


Other Parts Discussed in Thread: TIDEP-0090
Hi,
Would you pls help me on below questions about TIDEP-0090?
1. How does the radar mount in below test show in lab0013_traffic_monitoring_16xx/docs/traffic_monitoring_16xx_user_guide.html?
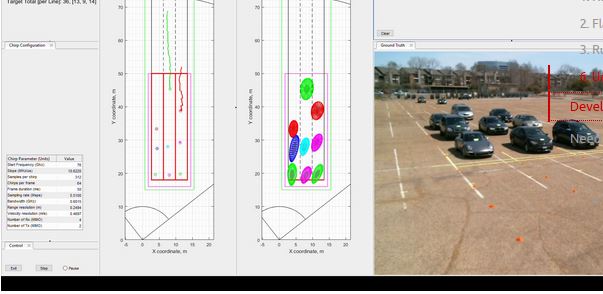
In tidud31.pdf, it says for Second Sensor Mount, the radar is 4.9m high and stop bar is 20m far way. But in above pic, you can see the stop bar distance to radar is less than 20m. Would you pls provide more detail on the radar mount info in above test case?
2. In traffic_monitoring_16xx_user_guide.html, you will see some car can be detected and tracked about 70ms away, but some can only be detected about 40m away. Why?
