Other Parts Discussed in Thread: SYSBIOS
Hello,
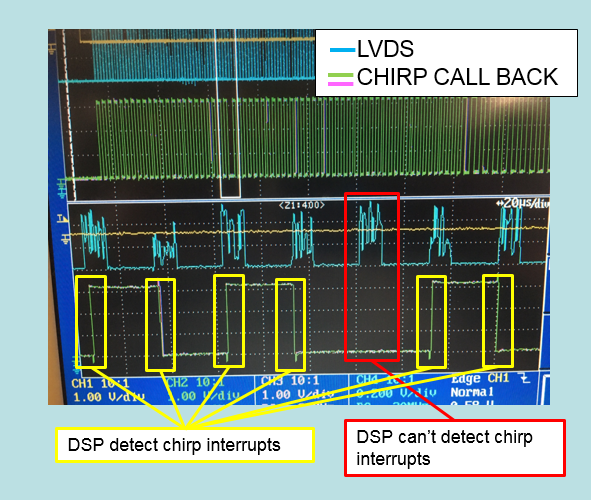
When debugging the timing of an LVDS and DSP chirp interrupt using an oscilloscope, the DSP may not detect the chirp interrupt.
*DSP is processing previousframe data.(Tracking etc.)
I think the MMIC is working properly because the hard-triggered LVDS is working properly.
So, I think there is a problem with SYS / BIOS.
Does the SYS/BIOS become less responsive to interrupts while the DSP is doing something?
Or are there other factors that can make the SYS/BIOS less responsive?
The environment is as follows.
SDK: 2.0.0.4
SYS / BIOS: 6.53.2.0
XDC: 3.50.4.43
* LVDS operates with a hard trigger and displays the Tx Hi waveform.
* The CHIRP CALL BACK (green and red) is inverted each time the DSP detects a chirp interrupt.