Other Parts Discussed in Thread: AWR1642
Hi,
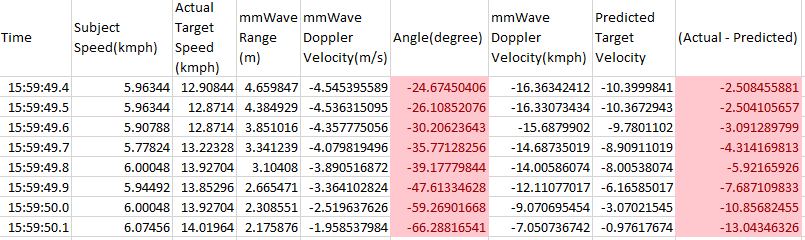
1) In SRR Demo, what is the velocity accuracy(in m/s) of tracked objects provided by AWR1642 BOOST for ranges lying beween 0-20m?
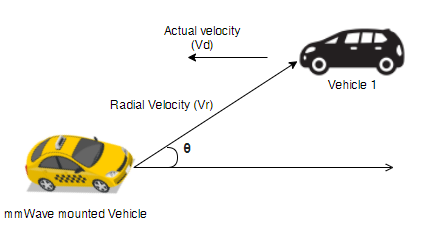
2) Is there any difference in accuracy of velocity when the angle of the tracked object is greater than 30 degree?
BR
Sreenath