- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
Tool/software: TI-RTOS
I follow the PDF to use CAN-FD as a serial interface to download the application meta image.
It can't receive data. So I try to transmit data from AWR1642 to PC.
I have this problem.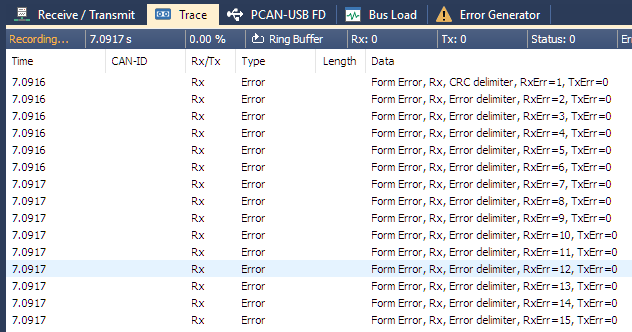
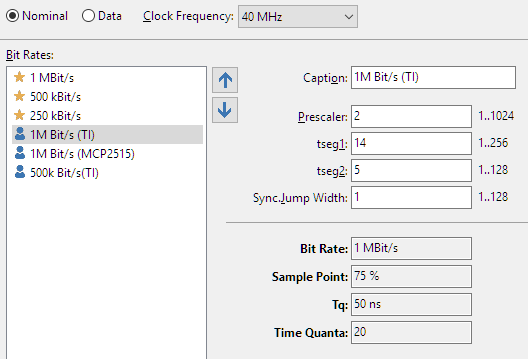
I have confirmed that the Bit rate(Nominal and Date) on both sides is the same.
It is OK when I use the same device for other project(packages\ti\drivers\canfd).