Other Parts Discussed in Thread: IWR1642
Hello everyone,
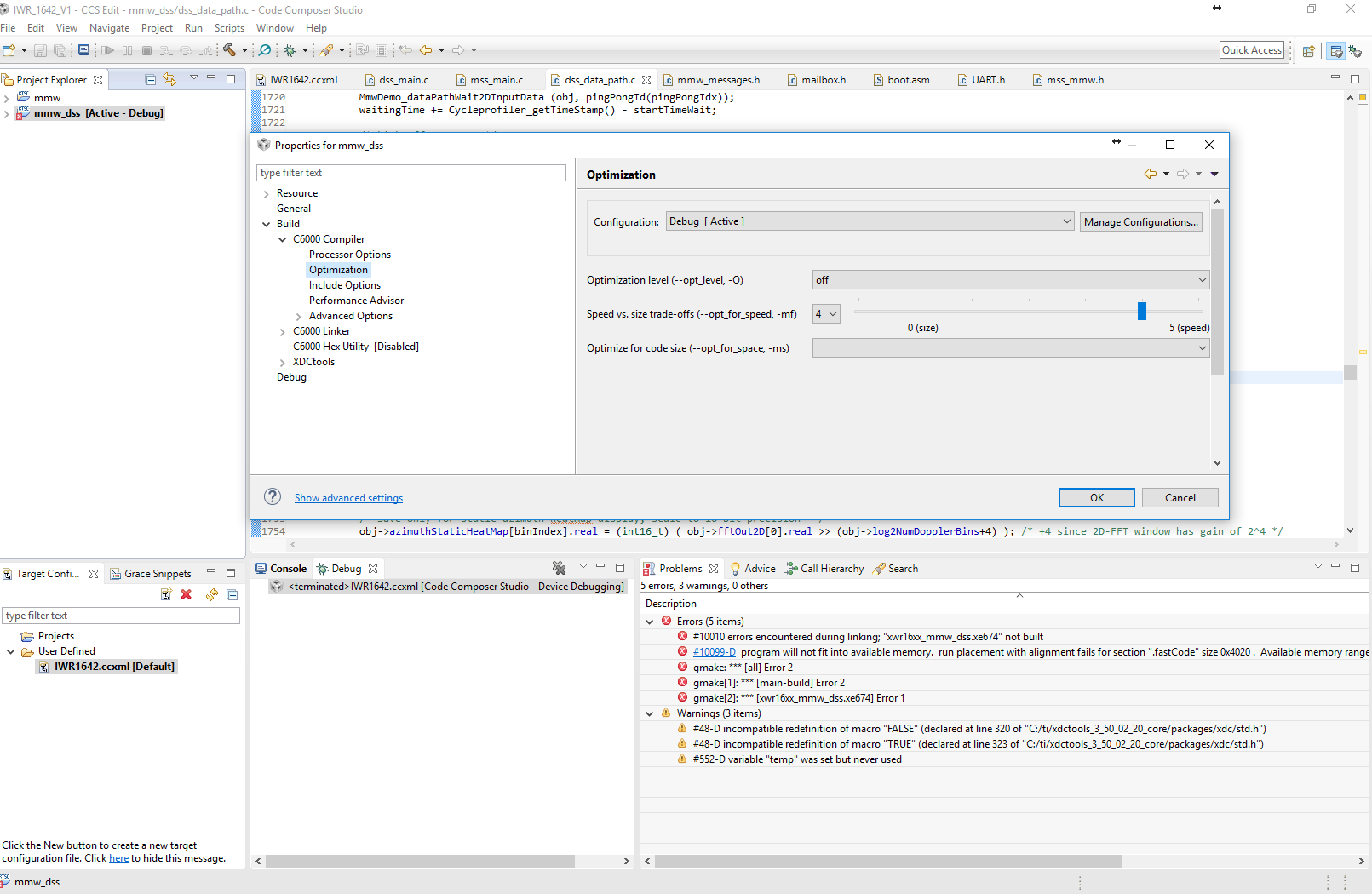
I need develope signal processing chain for processing data after 2D fft. The freqvency spectrum and targets parameters will be analyse (using matlab) for this sensor and we will use own detection algorithm. I have problem how to read I/Q data or 2D freqvency spectrum using UART without some next external board. I understand then the reading using UART is too slow but it does not matter. Is exist some example how to adjust example from mmWave SDK?
Thank you Michal