Tool/software: Code Composer Studio
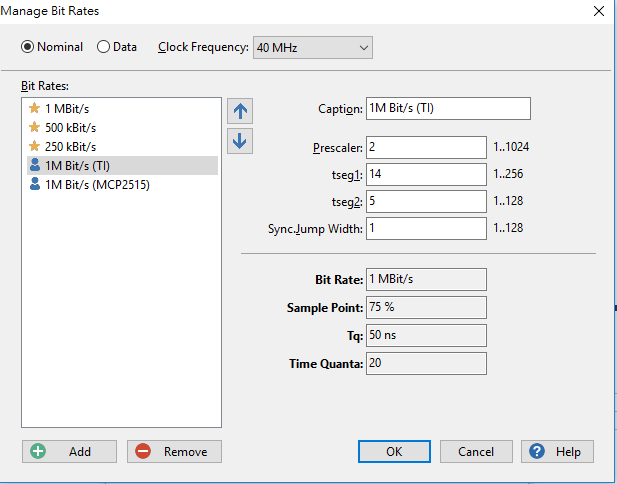
When I use CANFD in Type_CLASSIC, I use PCAN with this Bit Rate. (Nominal Bit rate = 1M Hz)
I can receive data from AWR1642.

But
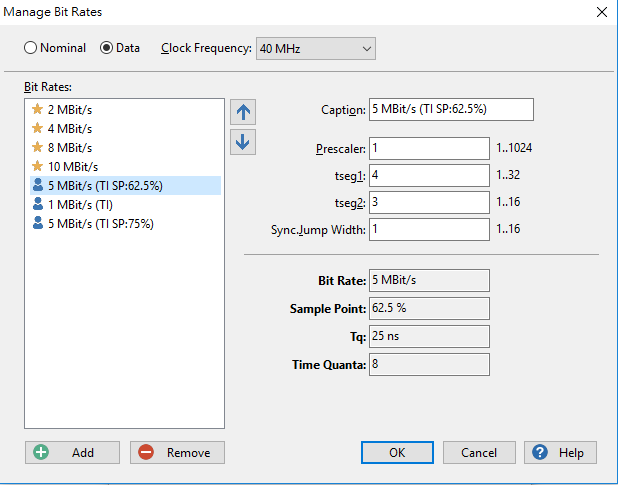
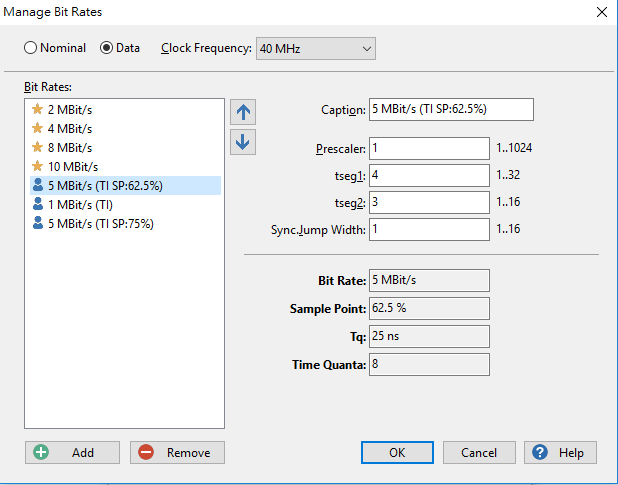
When I use CANFD in Type_FD, I use PCAN with this Bit Rate. (Nominal Bit rate = 1M Hz; Data Bit rate = 5M Hz)
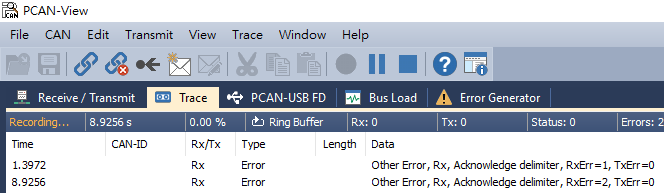
I can't receive data from AWR1642.
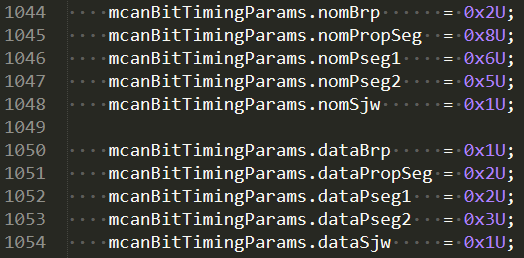
I just change
from CANFD_MCANFrameType testFrameType = CANFD_MCANFrameType_CLASSIC;
to CANFD_MCANFrameType testFrameType = CANFD_MCANFrameType_FD;
What is my negligence?