Other Parts Discussed in Thread: IWR1443, TIDEP-0094, MMWAVE-DFP
Hello
We are designing mmWave Radar system with a capability that can estimate a high speed, azimuth and elevation simulataneouly.
The chip considered is IWR1642. In the IWR1642 EVM, only azimuth can be estimated because all the antennas are aligned horizontally.
In the IWR1443EVM, the elevation and azimuth can be estimated using three tx antennas (two antennas aligned horizontally and the one vertically)
and TDM or BPM MIMO techinque.
According to the above conclusions, I thought that IWR1642 chip also can be used in estimating the elevation and azimuth at the same time
by changing the array of two Tx antennas like IWR1443.
The questions I'd like to clarify are right below.
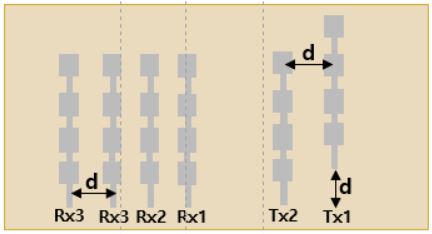
1. Is it possible to estimate the elevation and azimuth simultaneously using like the figure below.
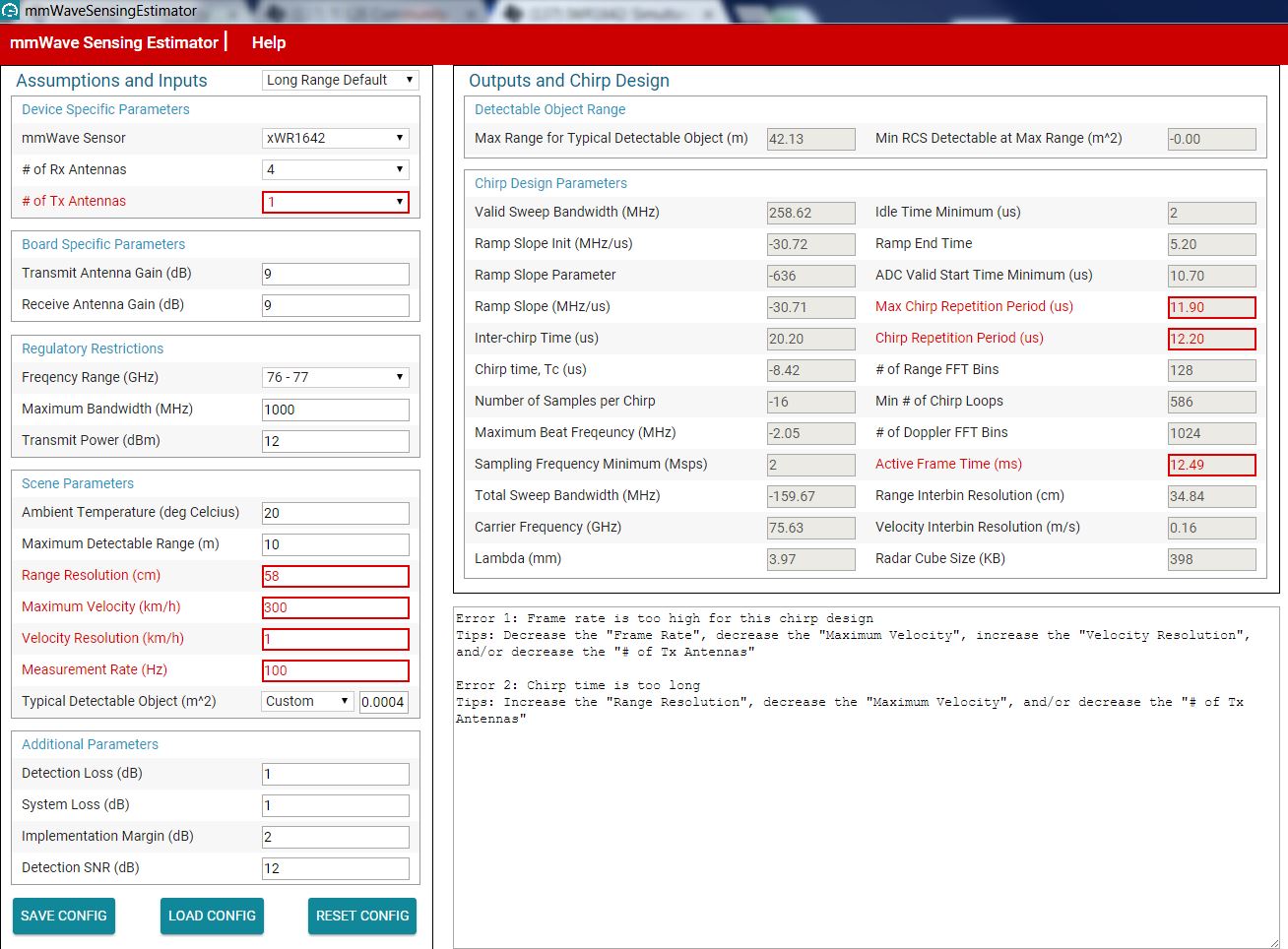
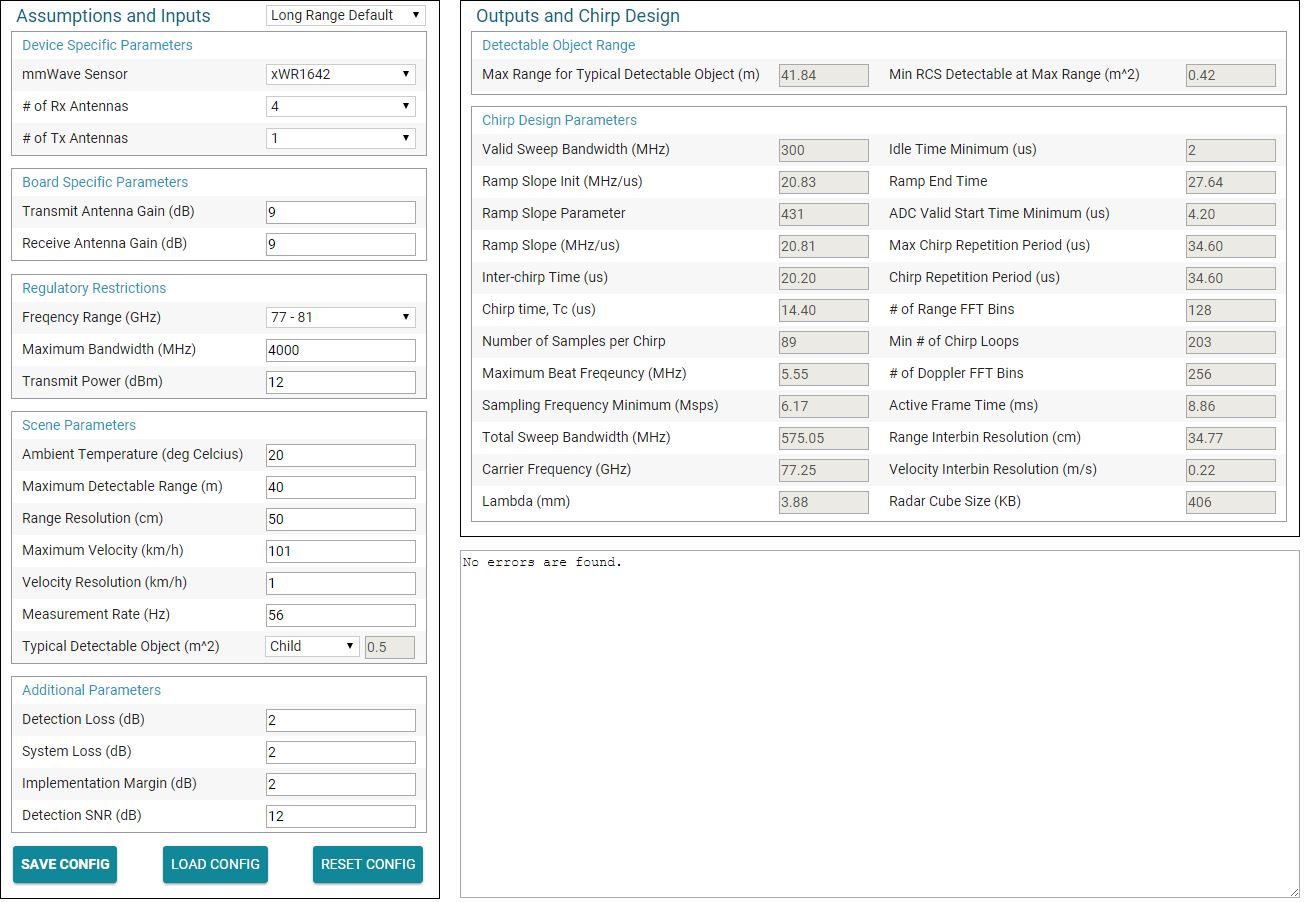
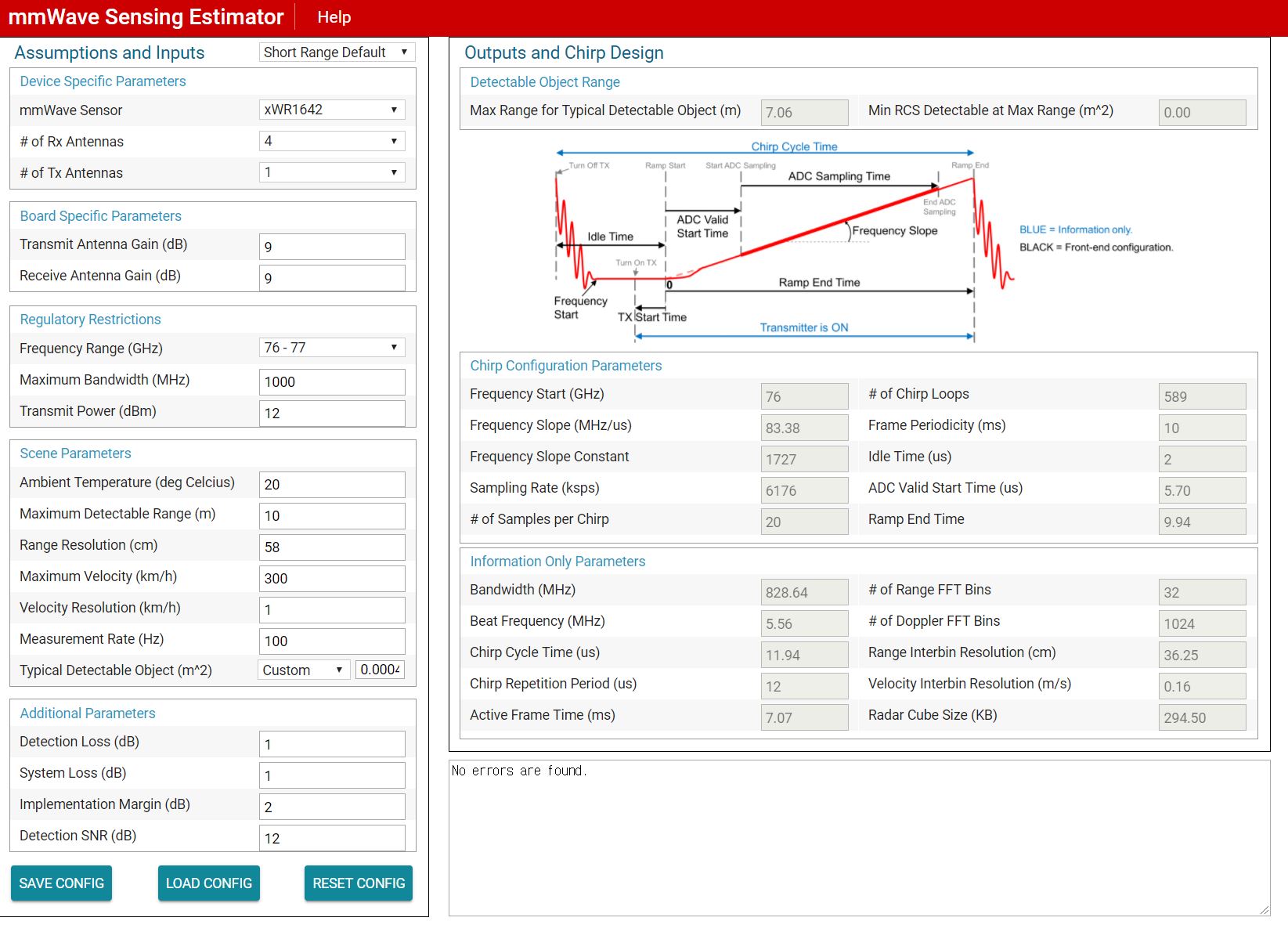
2. In the mmWave Demo, I couldn't get the speed above 200km/h with any configuration. If I use BPM MIMO technique,
Could I get the speed above 200km/h(with a resolution of 1km/h or below) and azimuth and elevation?
Thank you for your assistance.