Other Parts Discussed in Thread: AWR1843BOOST, , AWR1843
hi,
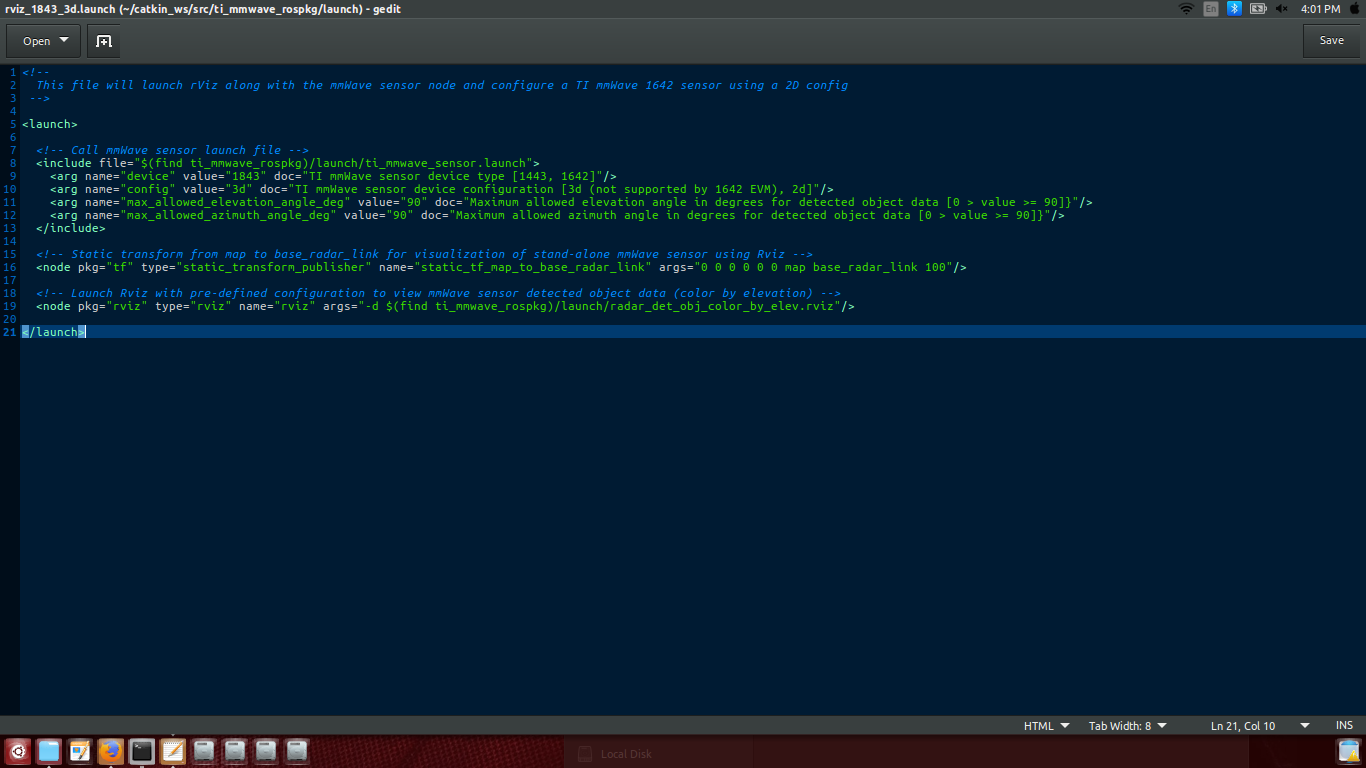
Can we implement the ROS Point Cloud demo for AWR1843BOOST EVM which is used for AWR1642BOOST? If, not how can i go about it.
Regards
Original question:

hi,
Can we implement the ROS Point Cloud demo for AWR1843BOOST EVM which is used for AWR1642BOOST? If, not how can i go about it.
Regards