Tool/software: Linux
After I get the point cloud like this,
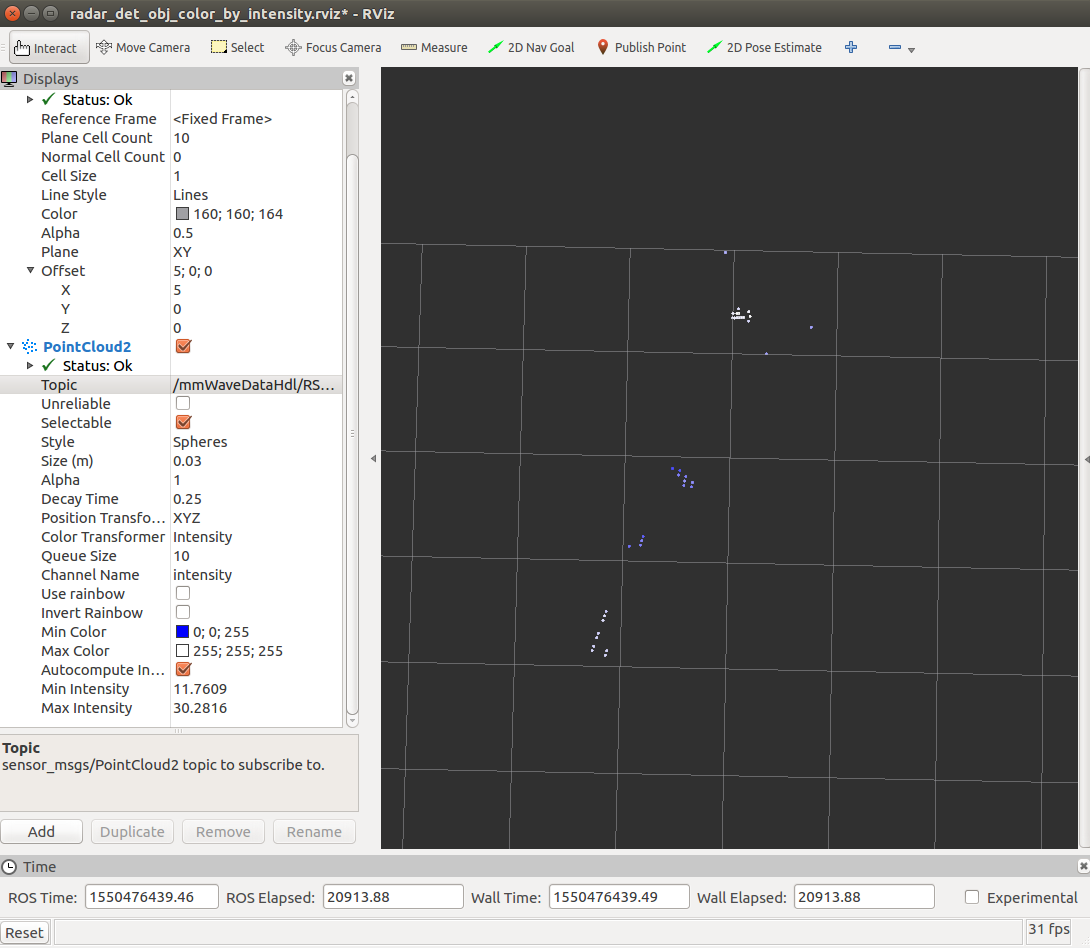
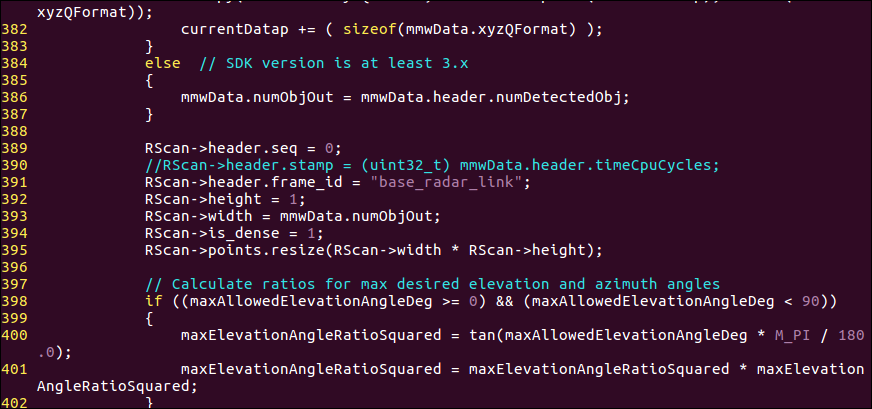
I want to save the point cloud information in PCD format ,and I used the command “rosrun pcl_ros pointcloud_to_pcd input:=/mmWaveDataHdl/RScan” to generate the PCD file with the name of zero all the time, instead of the file named with the real timestamp, which caused the newly generated file to overwrite the previous PCD file, may I ask how to solve this problem?