


Other Parts Discussed in Thread: AWR1642
Dear customer support,
I have AWR1642 connected to my computer directly (without any interface boards) as shown in the picture below. My task is to use the device as a short range radar with the highest possible resolution.

I used xwr16xx_high_accuracy_lab.bin from High Accuracy Lab together with High Accuracy Visualizer. But I met several issues.
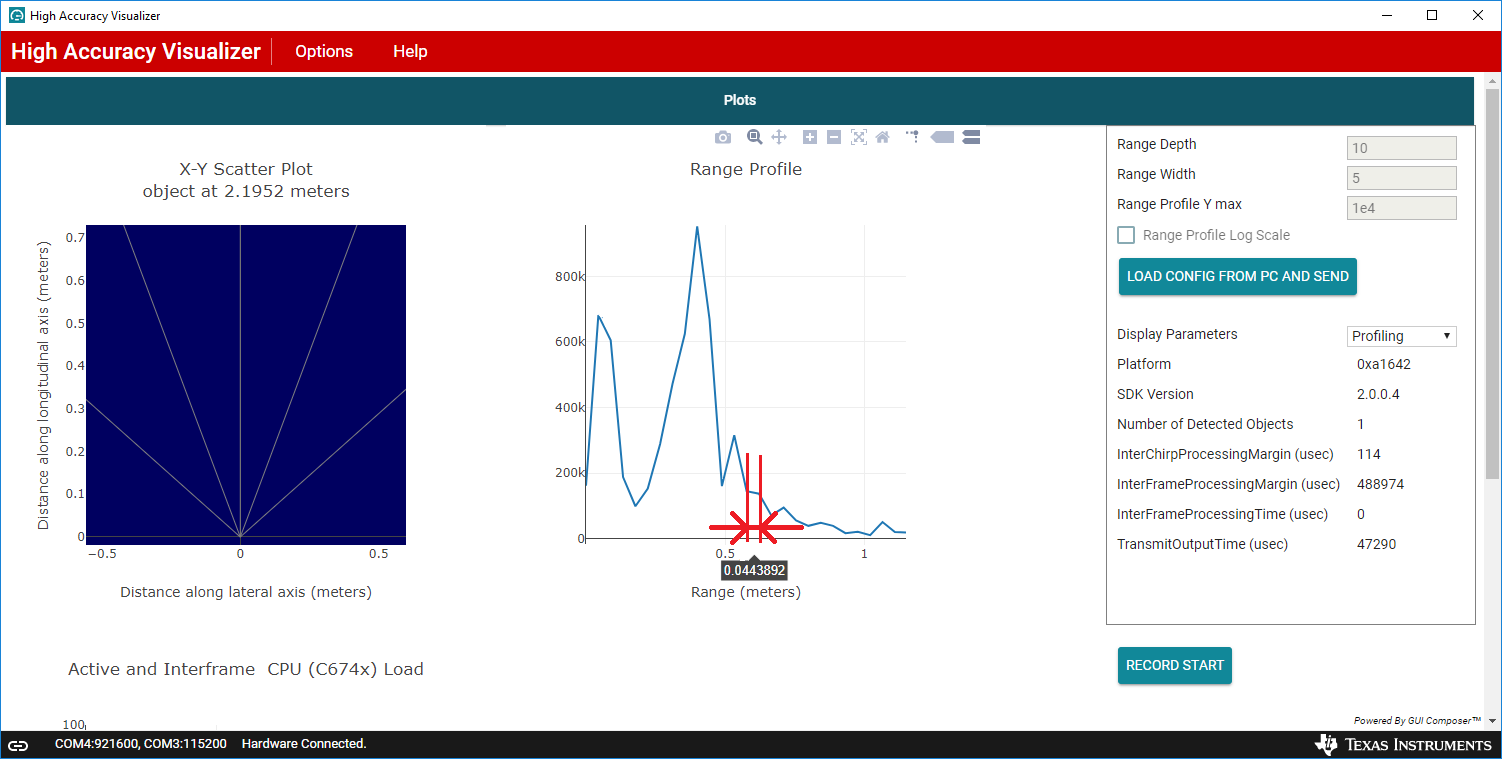
1. The resolution achieved in the Range Profile chart is much lower than I expected according to other discussions found in the forum. The distance between the diagram measurements is .0444 m. I hope to reach 1 mm.or even less. Is it possible?
2. Can you advise the simplest way to receive the highest resolution data in a small distance interval from AWR1642? Can it be obtained by programming?
Thank you,
Peter

