Other Parts Discussed in Thread: TDC1000
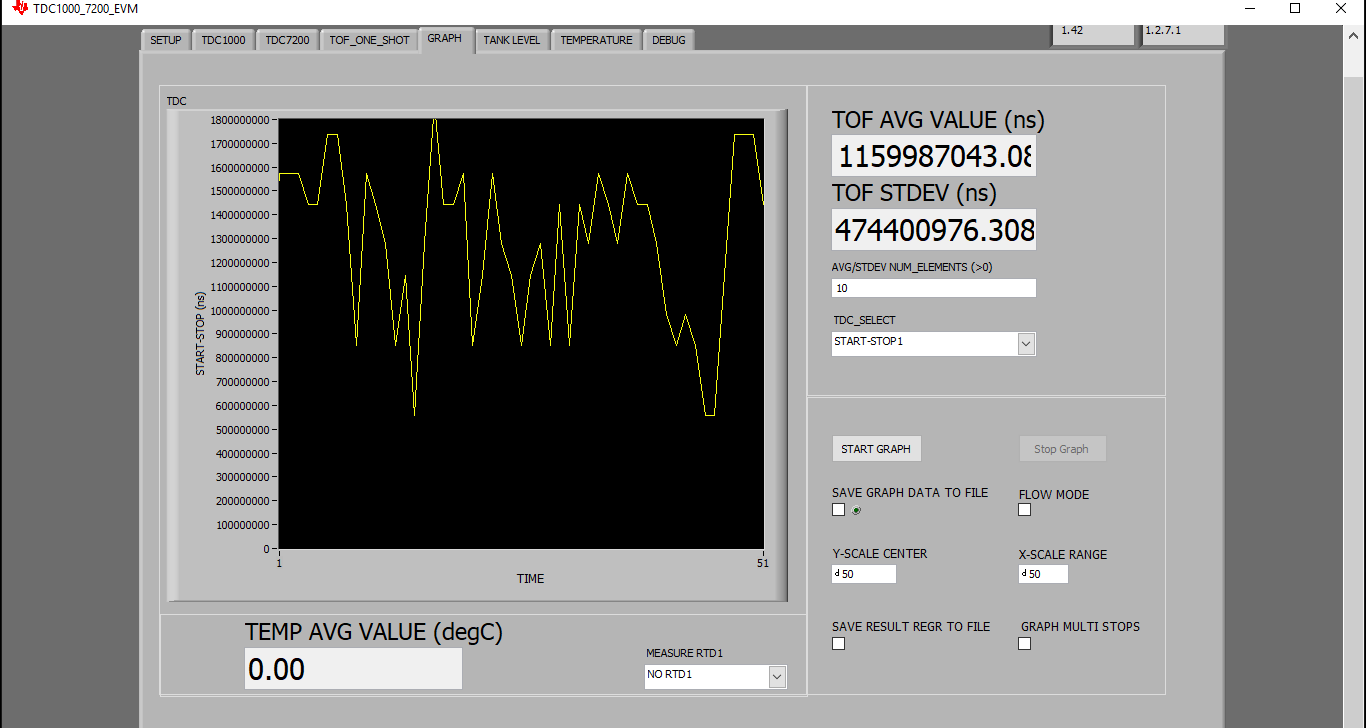
We are trying to read the TOF for Jar of diameter 5 cm to 12 cm with liquid and air. We go with the same setup of SW and the transducer is firmly fixed. When Start Graph is pressed, we are not getting any thing on the screen.
Our setup is attached here.