Other Parts Discussed in Thread: AWR1642
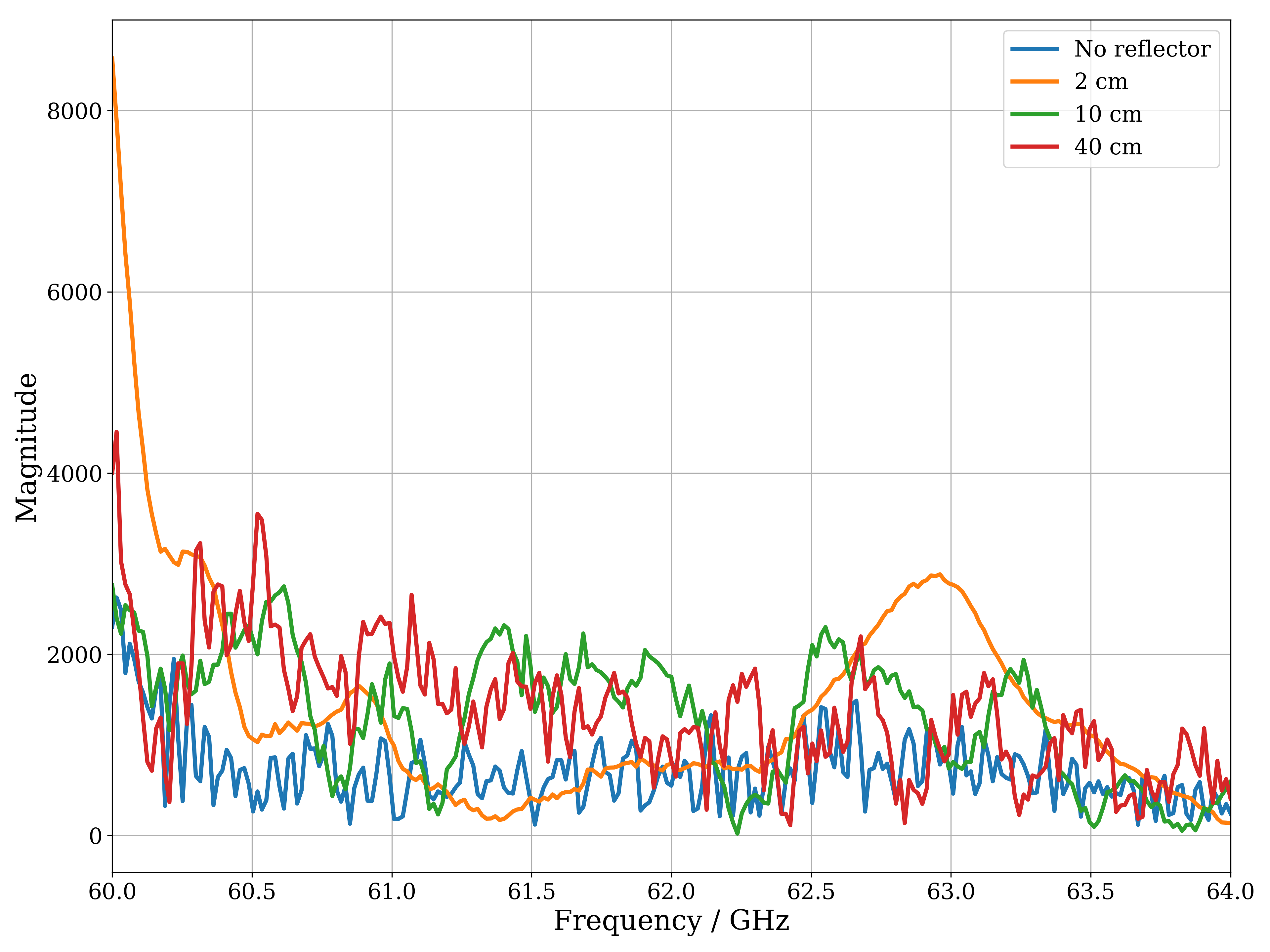
We are capturing the raw ADC data from the IWR6843AOPEVM. Without any objects present the magnitude of the signal is much the same as when there is a reflector close to the sensor.
Do the receiver channels have AGC and if so, can we turn it off?
Another contributor asked the same question for the AWR1642 and he was told there was no AGC, but his case didn't provide a solution to his problem.
On the Ti Training website, mmWave Training Series, the block diagram for the AWR16xx and IWR16xx devices in documents "Ti Automotive mmWave Sensors Device Overview" and "Ti Industrial mmWave Sensors Device Overview" both show a block "AGC/DC est." applied to the filter and gain stages of the receiver. I can't find any other documentation for this block.
Thanks,
Ian