Hi,
we have been working with the LDC1000 and the LDC1101 for a bit now. The goal is to precisely measure a distance of around 1mm to a target that is moving in axial direction.
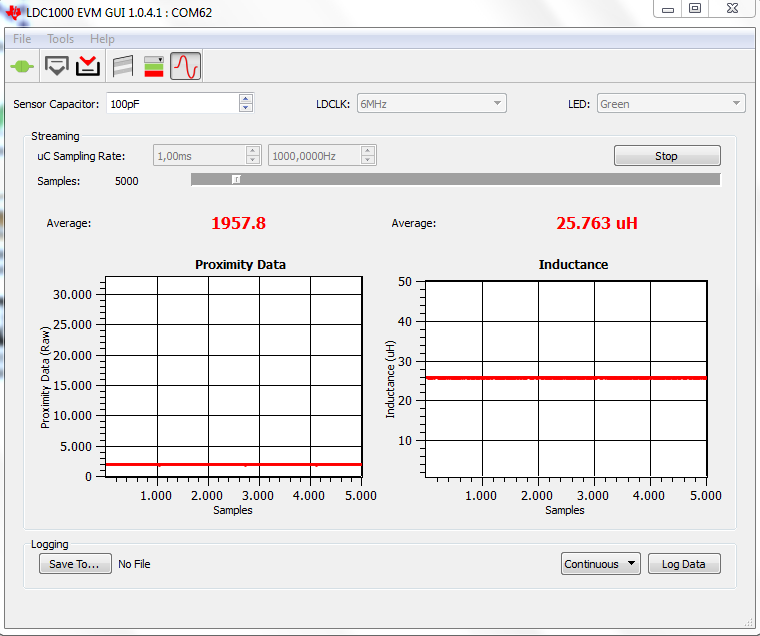
At the moment this is temporarily realized with the Rp measurement of the LDC1000. When switching to the LDC1101 we where not able to achieve the same effective resolution nor the signal-to-noise ratio that where achieved with the LDC1000.
The sensor coil is self-wound out of copper wire and paired with a 270pF capacitor.
The LC resonator circuit is oscillating at around 3.4MHz with the targest the furthest away and at around 3 MHz with the target in the closest position.
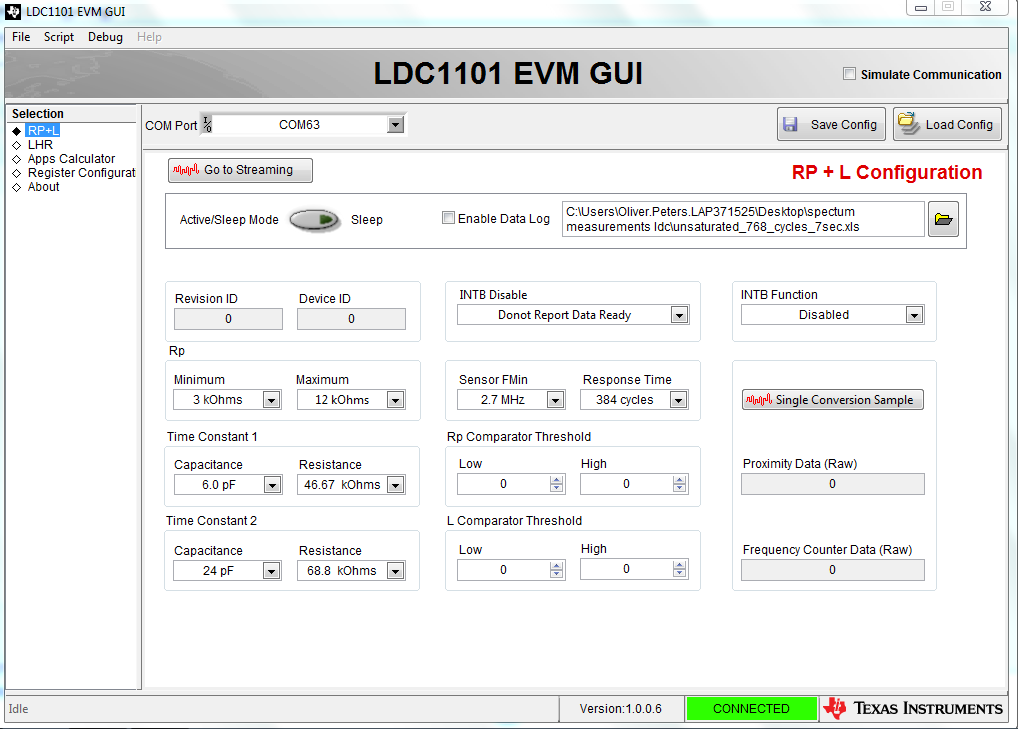
The sample rate has to be greater than 20ksps, therefor the response time was set to 384 cycles.
Rp_min and Rp_max where determined for each LDC Chip using the appropriate EVM GUI by making the Rp-intervall smaller until it is the smallest but not saturated in the lowest Rp nor highest Rp position. TC1 and TC2 Register Values where calculated and set accordingly.
However the resulting effective resolution is still quite low. Especially with the LDC1101. And with the response time set to 384 the Rp signal becomes very noisy in comparison to the LDC1000. Why is that? What can we do to make the effective resolution greater and reduce the noise?
What are the oscillators set by the time constants actually doing? Do they affect effective resolution and/or signal-noise-ratio?
What is the difference between Sensor Frequency (LDC1000 GUI) and Sensor FMin (LDC1101) ? How do they affect the measurement?
Does the reference clock have any influence on the Rp measurement?
Screenshots of the GUI settings and the resulting Rp Measurements for both LDCs in closest and furthest position are attached.
Thanks