Other Parts Discussed in Thread: MMWAVEICBOOST, TIDEP-0091, IWR1443, UNIFLASH, IWR1642
I'm using mmWave IWR6843.
I saw in TI website has PixMux software but Windows OS does not allow me to install it, so I may need to use Cloud PinMux Tool. But I see no tutorial of Cloud PixMux Tool and the correlation between PinMux tool setting and device code.
1. Is it necessary to write some register codes or hardware modification related to pinMux in order to use SPI, I2C? I checked the document swru546b, but there's no information about it. As I know, if we do wrong on pinMux, the board will be broken. Please provide me with documents and share real application experience on it,
I read IWR6843 datasheet and see some infor such as PINCNTL ADDRESS
I2C_SCL is 0xFFFFEA74
I2C_SDA is 0xFFFFEA78
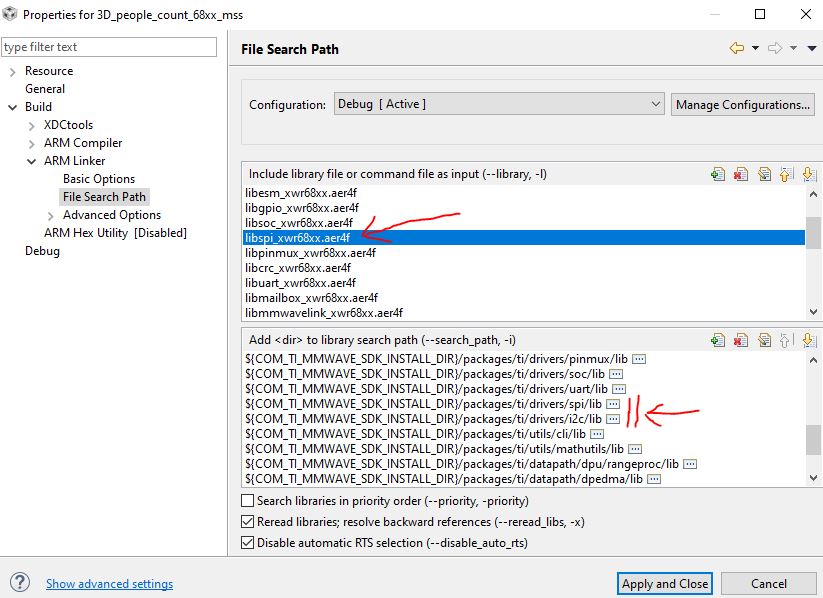
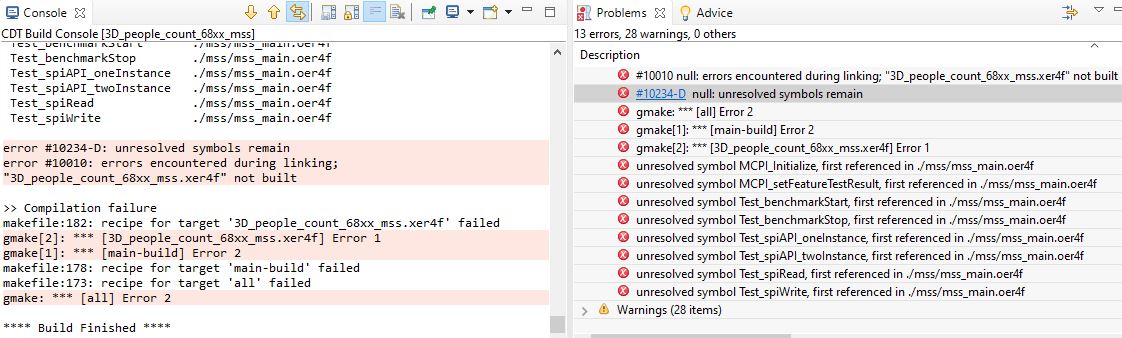
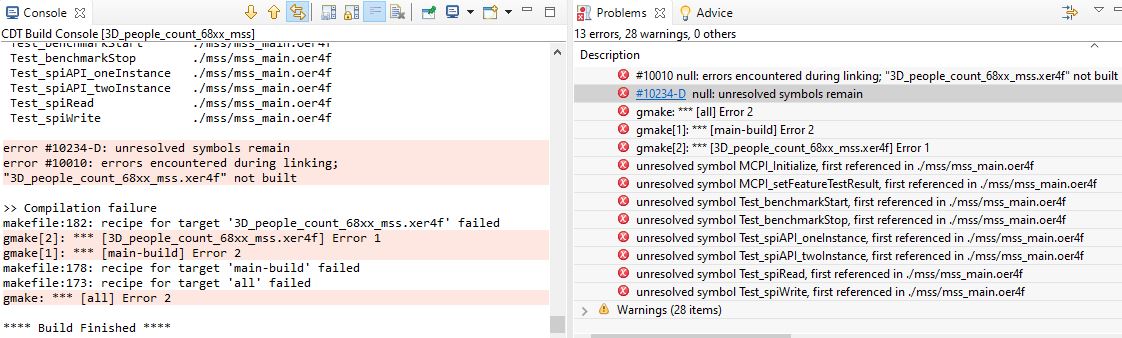
SPIA_CLK is 0xFFFFEA14, SPIA_CS_N, SPIB_CLK... Are SPIA & SPIB 2 SPI ports? Are these 2 SPI ports initially enabled ready for use or we have to do something to enable it? I checked SPI & I2C reference code in SDK, but I don't see any correlation between pinmux and SPI, I2C. Please explain in more details.
Based on PINCNTL ADDRESS, please show me how to write code for SPI/I2C corresponding to PinMux settings.
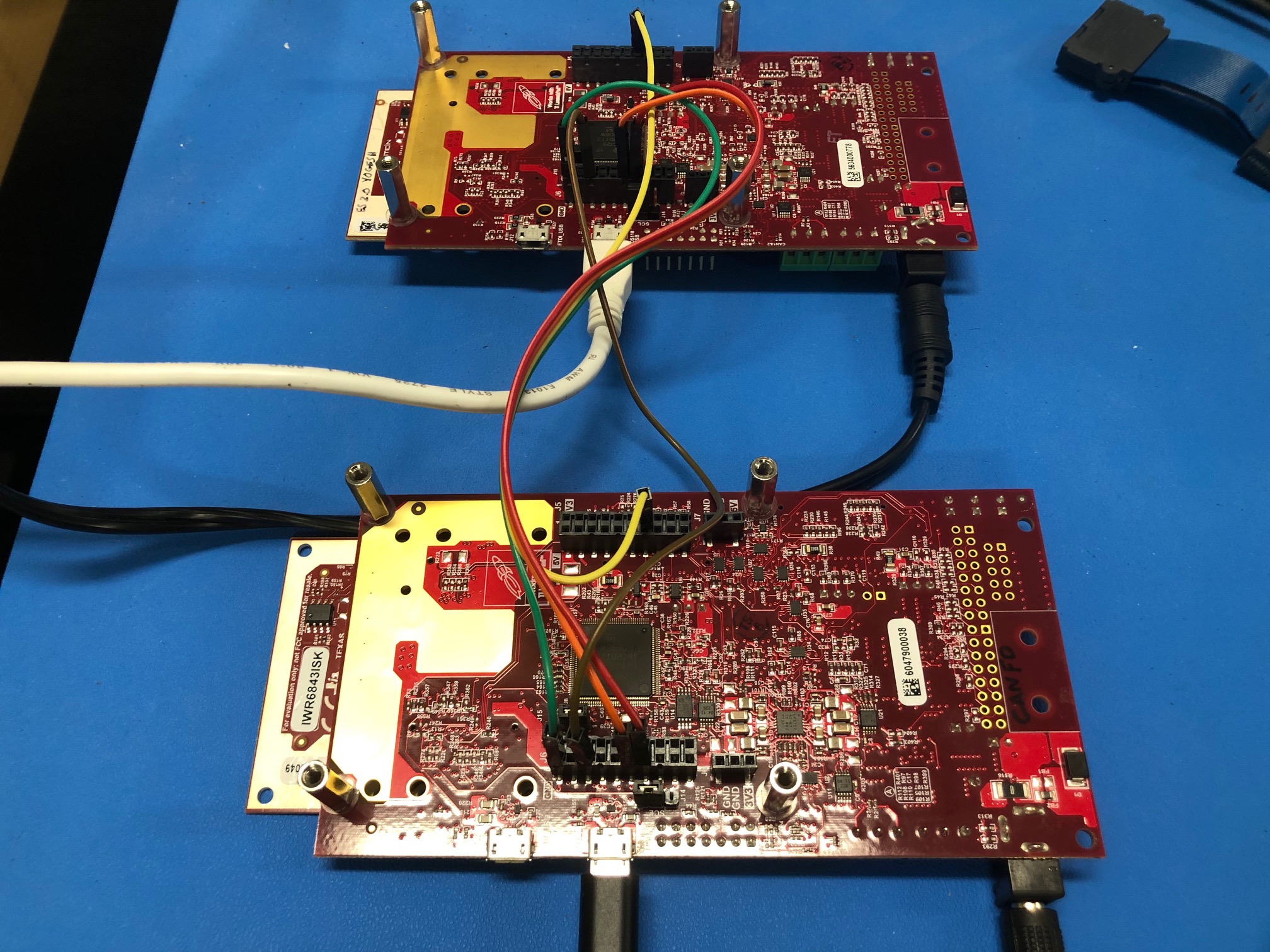
2. By the way, can u introduce me any adapter device (SPI/I2C to USB converter) to connect IWR6843 to PC via SPI/I2C pins? I found some FTDI ICs FT2232C (for SPI), FT232H (for I2C). Is it better to connect IWR6843 to Rapsberry Pi 3 via SPI/I2C directly rather than using SPI/I2C-to-USB converter to general-purpose PC? If I connect IWR6843 to Rapsberry Pi 3 model B+ via SPI/I2C, the voltages are the same to connect without having to use any adapter, right?
3. If I use FTDI IC for SPI/I2C to USB converter, how can I send data from IWR6843 to PC through FTDI IC? Do I need to write my own code for FTDI IC or there's an API?
If I don't care the IC brand, can you suggest me some SPI/I2C to USB converter which provides me with full source code to send data?
4. If I use Rapsberry Pi 3 to get data from IWR6843 via SPI/I2C, is there any difference between TI SDK in Windows OS and Linux? Can I use the same TI source code on different OS? If not, please give me link to download SDK, and all TI required tools on Linux in order to test with Rapsberry Pi 3.