


Other Parts Discussed in Thread: IWR1443, UNIFLASH
I have been trying to get data out from a few IWR1443 units I have been playing within Ubuntu 18.04.
Basically, what I want to do is to get some data from the unit, to validate that it works.
So far I have been unsuccessful and I think I am overlooking something rather simple.
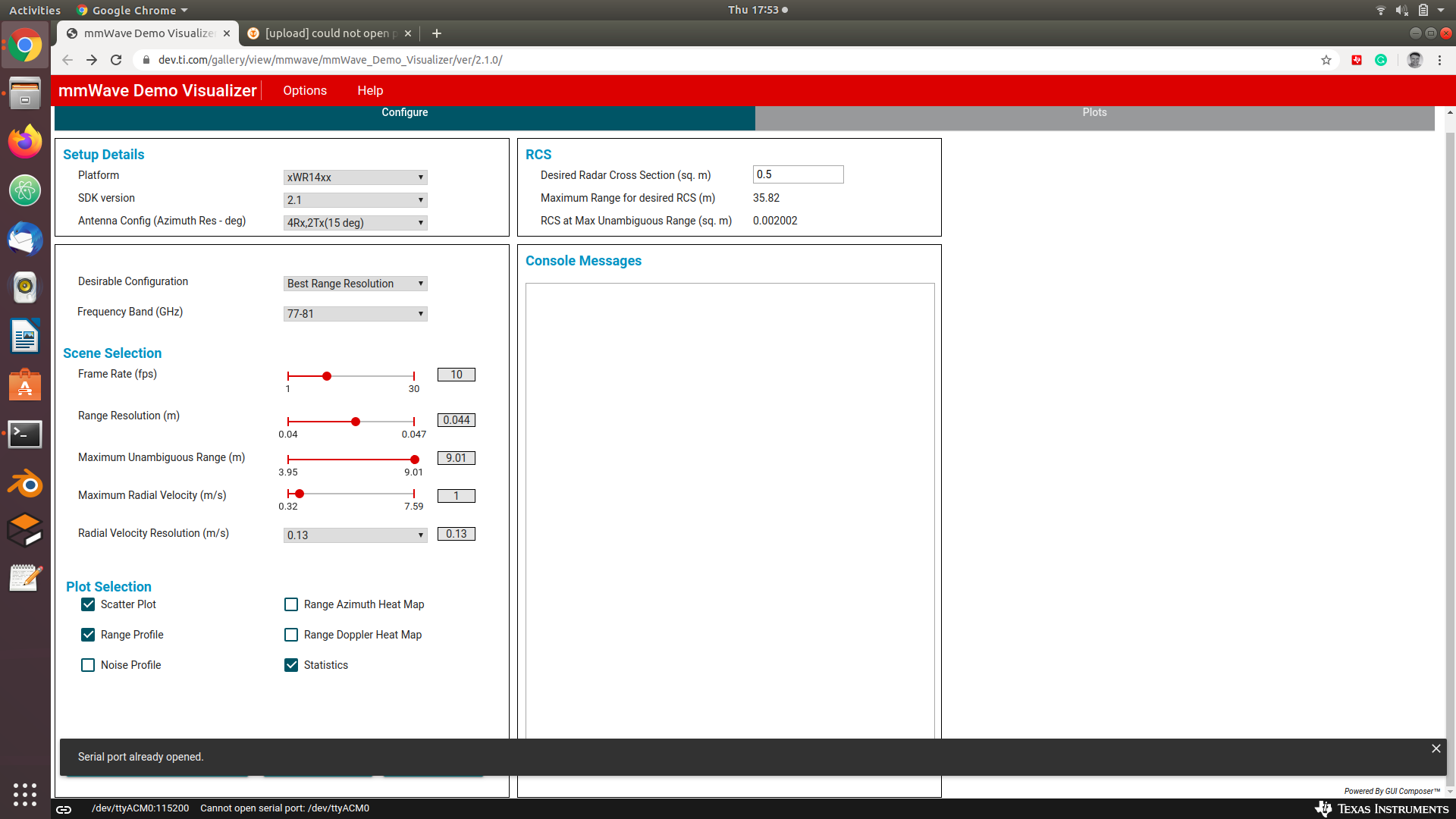
In mmWave Demo Visualizer is get the following error:
I have set up my serial port for the units in the following way to ensure full access:
$ ls -la /dev/ttyACM* crw-rw-rw- 1 root dialout 166, 0 Apr 23 17:56 /dev/ttyACM0 crw-rw-rw- 1 root dialout 166, 1 Apr 23 17:56 /dev/ttyACM1
My user is also part of dialout, so the should not be any problem:
I can connect to the unit with UniFlash 6 and have tried to load a new version of the 2.1 SDK on to it.
But the result was the same in this case.
I have also attempted with the ROS node from here:
https://github.com/radar-lab/ti_mmwave_rospkgIn this case I am able to connect to the unit in the second launch consistently, but I still do not receive any data from the unit.
roslaunch ti_mmwave_rospkg 1443es1_short_range.launch ... logging to /home/martin/.ros/log/3406aacc-857d-11ea-a4ee-3cf011b7138f/roslaunch-ddwmpc-laptop-11088.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://ddwmpc-laptop:37713/ SUMMARY ======== PARAMETERS * /rosdistro: melodic * /rosversion: 1.14.5 * /ti_mmwave/command_port: /dev/ttyACM0 * /ti_mmwave/command_rate: 115200 * /ti_mmwave/data_port: /dev/ttyACM1 * /ti_mmwave/data_rate: 921600 * /ti_mmwave/frame_id: ti_mmwave * /ti_mmwave/max_allowed_azimuth_angle_deg: 90 * /ti_mmwave/max_allowed_elevation_angle_deg: 90 NODES / mmWaveQuickConfig (ti_mmwave_rospkg/mmWaveQuickConfig) rviz (rviz/rviz) static_tf_map_to_base_radar_link (tf/static_transform_publisher) ti_mmwave (ti_mmwave_rospkg/ti_mmwave_rospkg) auto-starting new master process[master]: started with pid [11098] ROS_MASTER_URI=http://localhost:11311 setting /run_id to 3406aacc-857d-11ea-a4ee-3cf011b7138f process[rosout-1]: started with pid [11109] started core service [/rosout] process[ti_mmwave-2]: started with pid [11116] process[mmWaveQuickConfig-3]: started with pid [11117] process[static_tf_map_to_base_radar_link-4]: started with pid [11118] [ INFO] [1587658338.729837485]: mmWaveQuickConfig: Configuring mmWave device using config file: /home/martin/ros_radar/src/ti_mmwave_rospkg/cfg/1443es1_short_range_3d.cfg [ INFO] [1587658338.730897952]: waitForService: Service [/mmWaveCLI] has not been advertised, waiting... process[rviz-5]: started with pid [11124] [ INFO] [1587658338.765245770]: Initializing nodelet with 8 worker threads. [ INFO] [1587658338.770139457]: mmWaveCommSrv: command_port = /dev/ttyACM0 [ INFO] [1587658338.770170001]: mmWaveCommSrv: command_rate = 115200 [ INFO] [1587658338.773036867]: mmWaveDataHdl: data_port = /dev/ttyACM1 [ INFO] [1587658338.773084069]: mmWaveDataHdl: data_rate = 921600 [ INFO] [1587658338.773100882]: mmWaveDataHdl: max_allowed_elevation_angle_deg = 90 [ INFO] [1587658338.773130886]: mmWaveDataHdl: max_allowed_azimuth_angle_deg = 90 [ INFO] [1587658338.774076628]: waitForService: Service [/mmWaveCLI] is now available. [ INFO] [1587658339.275966883]: mmWaveCommSrv: Sending command to sensor: 'sensorStop' [ INFO] [1587658339.283429887]: mmWaveCommSrv: Received response from sensor: 'sensorStop '?`????`????`???~' is not recognized as a CLI command mmwDemo:/>' [ERROR] [1587658339.284441048]: mmWaveQuickConfig: Command failed (mmWave sensor did not respond with 'Done') [ERROR] [1587658339.284474908]: mmWaveQuickConfig: Response: 'sensorStop '?`????`????`???~' is not recognized as a CLI command mmwDemo:/>' [mmWaveQuickConfig-3] process has died [pid 11117, exit code 1, cmd /home/martin/ros_radar/devel/lib/ti_mmwave_rospkg/mmWaveQuickConfig /home/martin/ros_radar/src/ti_mmwave_rospkg/cfg/1443es1_short_range_3d.cfg __name:=mmWaveQuickConfig __log:=/home/martin/.ros/log/3406aacc-857d-11ea-a4ee-3cf011b7138f/mmWaveQuickConfig-3.log]. log file: /home/martin/.ros/log/3406aacc-857d-11ea-a4ee-3cf011b7138f/mmWaveQuickConfig-3*.log ^C[rviz-5] killing on exit [static_tf_map_to_base_radar_link-4] killing on exit [ti_mmwave-2] killing on exit [ti_mmwave-2] escalating to SIGTERM [rosout-1] killing on exit [master] killing on exit shutting down processing monitor... ... shutting down processing monitor complete done martin@ddwmpc-laptop:~/ros_radar$ roslaunch ti_mmwave_rospkg 1443es1_short_range.launch ... logging to /home/martin/.ros/log/f38f8328-857d-11ea-a4ee-3cf011b7138f/roslaunch-ddwmpc-laptop-9900.log Checking log directory for disk usage. This may take a while. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://ddwmpc-laptop:33811/ SUMMARY ======== PARAMETERS * /rosdistro: melodic * /rosversion: 1.14.5 * /ti_mmwave/command_port: /dev/ttyACM0 * /ti_mmwave/command_rate: 115200 * /ti_mmwave/data_port: /dev/ttyACM1 * /ti_mmwave/data_rate: 921600 * /ti_mmwave/frame_id: ti_mmwave * /ti_mmwave/max_allowed_azimuth_angle_deg: 90 * /ti_mmwave/max_allowed_elevation_angle_deg: 90 NODES / mmWaveQuickConfig (ti_mmwave_rospkg/mmWaveQuickConfig) rviz (rviz/rviz) static_tf_map_to_base_radar_link (tf/static_transform_publisher) ti_mmwave (ti_mmwave_rospkg/ti_mmwave_rospkg) auto-starting new master process[master]: started with pid [9911] ROS_MASTER_URI=http://localhost:11311 setting /run_id to f38f8328-857d-11ea-a4ee-3cf011b7138f process[rosout-1]: started with pid [9922] started core service [/rosout] process[ti_mmwave-2]: started with pid [9929] process[mmWaveQuickConfig-3]: started with pid [9930] process[static_tf_map_to_base_radar_link-4]: started with pid [9931] [ INFO] [1587658660.351044815]: mmWaveQuickConfig: Configuring mmWave device using config file: /home/martin/ros_radar/src/ti_mmwave_rospkg/cfg/1443es1_short_range_3d.cfg [ INFO] [1587658660.352221049]: waitForService: Service [/mmWaveCLI] has not been advertised, waiting... process[rviz-5]: started with pid [9937] [ INFO] [1587658660.386612987]: Initializing nodelet with 8 worker threads. [ INFO] [1587658660.390905710]: mmWaveCommSrv: command_port = /dev/ttyACM0 [ INFO] [1587658660.390953326]: mmWaveCommSrv: command_rate = 115200 [ INFO] [1587658660.394243565]: mmWaveDataHdl: data_port = /dev/ttyACM1 [ INFO] [1587658660.394286180]: mmWaveDataHdl: data_rate = 921600 [ INFO] [1587658660.394305813]: mmWaveDataHdl: max_allowed_elevation_angle_deg = 90 [ INFO] [1587658660.394330667]: mmWaveDataHdl: max_allowed_azimuth_angle_deg = 90 [ INFO] [1587658660.394408191]: waitForService: Service [/mmWaveCLI] is now available. [ INFO] [1587658660.898064692]: mmWaveCommSrv: Sending command to sensor: 'sensorStop' [ INFO] [1587658660.901259760]: mmWaveCommSrv: Received response from sensor: 'sensorStop Done mmwDemo:/>' [ INFO] [1587658660.907344633]: mmWaveCommSrv: Sending command to sensor: 'flushCfg' [ INFO] [1587658660.910150456]: mmWaveCommSrv: Received response from sensor: 'flushCfg Done mmwDemo:/>' [ INFO] [1587658660.914434156]: mmWaveCommSrv: Sending command to sensor: 'dfeDataOutputMode 1' [ INFO] [1587658660.918161443]: mmWaveCommSrv: Received response from sensor: 'dfeDataOutputMode 1 Done mmwDemo:/>' [ INFO] [1587658660.921583736]: mmWaveCommSrv: Sending command to sensor: 'channelCfg 15 7 0' [ INFO] [1587658660.925109080]: mmWaveCommSrv: Received response from sensor: 'channelCfg 15 7 0 Done mmwDemo:/>' [ INFO] [1587658660.928807006]: mmWaveCommSrv: Sending command to sensor: 'adcCfg 2 1' [ INFO] [1587658660.931740193]: mmWaveCommSrv: Received response from sensor: 'adcCfg 2 1 Done mmwDemo:/>' [ INFO] [1587658660.934732484]: mmWaveCommSrv: Sending command to sensor: 'adcbufCfg 0 1 0 1' [ INFO] [1587658660.938274044]: mmWaveCommSrv: Received response from sensor: 'adcbufCfg 0 1 0 1 Done mmwDemo:/>' [ INFO] [1587658660.940965706]: mmWaveCommSrv: Sending command to sensor: 'profileCfg 0 77 7 7 57.14 0 0 70 1 240 4884 0 0 30' [ INFO] [1587658660.947405795]: mmWaveCommSrv: Received response from sensor: 'profileCfg 0 77 7 7 57.14 0 0 70 1 240 4884 0 0 30 Done mmwDemo:/>' [ INFO] [1587658660.961199517]: mmWaveCommSrv: Sending command to sensor: 'chirpCfg 0 0 0 0 0 0 0 1' [ INFO] [1587658660.965320113]: mmWaveCommSrv: Received response from sensor: 'chirpCfg 0 0 0 0 0 0 0 1 Done mmwDemo:/>' [ INFO] [1587658660.967893370]: mmWaveCommSrv: Sending command to sensor: 'chirpCfg 1 1 0 0 0 0 0 4' [ INFO] [1587658660.972037577]: mmWaveCommSrv: Received response from sensor: 'chirpCfg 1 1 0 0 0 0 0 4 Done mmwDemo:/>' [ INFO] [1587658660.974985849]: mmWaveCommSrv: Sending command to sensor: 'chirpCfg 2 2 0 0 0 0 0 2' [ INFO] [1587658660.979129608]: mmWaveCommSrv: Received response from sensor: 'chirpCfg 2 2 0 0 0 0 0 2 Done mmwDemo:/>' [ INFO] [1587658660.981871910]: mmWaveCommSrv: Sending command to sensor: 'frameCfg 0 2 16 0 33.333 1 0' [ INFO] [1587658660.986378031]: mmWaveCommSrv: Received response from sensor: 'frameCfg 0 2 16 0 33.333 1 0 Done mmwDemo:/>' [ INFO] [1587658660.995436004]: mmWaveCommSrv: Sending command to sensor: 'guiMonitor 1 0 0 0 0 0' [ INFO] [1587658660.999420809]: mmWaveCommSrv: Received response from sensor: 'guiMonitor 1 0 0 0 0 0 Done mmwDemo:/>' [ INFO] [1587658661.002289101]: mmWaveCommSrv: Sending command to sensor: 'cfarCfg 0 2 8 4 4 0 4000' [ INFO] [1587658661.006415873]: mmWaveCommSrv: Received response from sensor: 'cfarCfg 0 2 8 4 4 0 4000 Done mmwDemo:/>' [ INFO] [1587658661.008831919]: mmWaveCommSrv: Sending command to sensor: 'peakGrouping 1 0 1 1 229' [ INFO] [1587658661.012921111]: mmWaveCommSrv: Received response from sensor: 'peakGrouping 1 0 1 1 229 Done mmwDemo:/>' [ INFO] [1587658661.015368475]: mmWaveCommSrv: Sending command to sensor: 'multiObjBeamForming 1 0.5' [ INFO] [1587658661.019587339]: mmWaveCommSrv: Received response from sensor: 'multiObjBeamForming 1 0.5 Done mmwDemo:/>' [ INFO] [1587658661.029452745]: mmWaveCommSrv: Sending command to sensor: 'clutterRemoval 0' [ INFO] [1587658661.032969276]: mmWaveCommSrv: Received response from sensor: 'clutterRemoval 0 Done mmwDemo:/>' [ INFO] [1587658661.035571039]: mmWaveCommSrv: Sending command to sensor: 'calibDcRangeSig 0 -5 8 256' [ INFO] [1587658661.039925159]: mmWaveCommSrv: Received response from sensor: 'calibDcRangeSig 0 -5 8 256 Done mmwDemo:/>' [ INFO] [1587658661.043371121]: mmWaveCommSrv: Sending command to sensor: 'compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0' [ INFO] [1587658661.052056783]: mmWaveCommSrv: Received response from sensor: 'compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 Done mmwDemo:/>' [ INFO] [1587658661.054944033]: mmWaveCommSrv: Sending command to sensor: 'measureRangeBiasAndRxChanPhase 0 1.5 0.2' [ INFO] [1587658661.060471293]: mmWaveCommSrv: Received response from sensor: 'measureRangeBiasAndRxChanPhase 0 1.5 0.2 Done mmwDemo:/>' [ INFO] [1587658661.063233954]: mmWaveCommSrv: Sending command to sensor: 'CQRxSatMonitor 0 3 5 123 0' [ INFO] [1587658661.067529470]: mmWaveCommSrv: Received response from sensor: 'CQRxSatMonitor 0 3 5 123 0 Done mmwDemo:/>' [ INFO] [1587658661.070224011]: mmWaveCommSrv: Sending command to sensor: 'CQSigImgMonitor 0 119 4' [ INFO] [1587658661.074049736]: mmWaveCommSrv: Received response from sensor: 'CQSigImgMonitor 0 119 4 Done mmwDemo:/>' [ INFO] [1587658661.077899034]: mmWaveCommSrv: Sending command to sensor: 'analogMonitor 1 1' [ INFO] [1587658661.081392609]: mmWaveCommSrv: Received response from sensor: 'analogMonitor 1 1 Done mmwDemo:/>' [ INFO] [1587658661.084216696]: mmWaveCommSrv: Sending command to sensor: 'sensorStart' [ INFO] [1587658661.157632845]: mmWaveCommSrv: Received response from sensor: 'sensorStart Debug: Init Calibration Status = 0x7fe Done mmwDemo:/>' [ INFO] [1587658661.203567148]: mmWaveQuickConfig: mmWaveQuickConfig will now terminate. Done configuring mmWave device using config file: /home/martin/ros_radar/src/ti_mmwave_rospkg/cfg/1443es1_short_range_3d.cfg [ INFO] [1587658661.207729392]: ============================== List of parameters ============================== Number of range samples: 240 Number of chirps: 16 f_s: 4.884 MHz f_c: 79.210 GHz Bandwidth: 3439.804 MHz PRI: 64.140 us Frame time: 33.333 ms Max range: 10.458 m Range resolution: 0.044 m Max Doppler: +-4.917 m/s Doppler resolution: 0.615 m/s ============================== [ INFO] [1587658661.208072294]: DataUARTHandler Read Thread: Failed to open Data serial port with error: IO Exception (2): No such file or directory, file /home/martin/ros_radar/src/serial/src/impl/unix.cc, line 151. [ INFO] [1587658661.208108799]: DataUARTHandler Read Thread: Waiting 20 seconds before trying again... [mmWaveQuickConfig-3] process has finished cleanly log file: /home/martin/.ros/log/f38f8328-857d-11ea-a4ee-3cf011b7138f/mmWaveQuickConfig-3*.log [ INFO] [1587658681.208983437]: DataUARTHandler Read Thread: Port is open
Any input, what I could be doing wrong.

