Hi Team,
Thank you for your support.
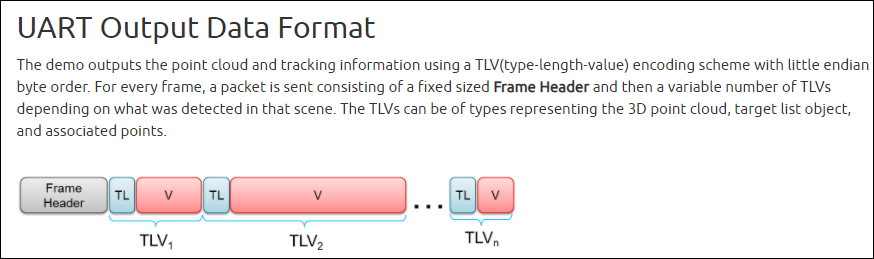
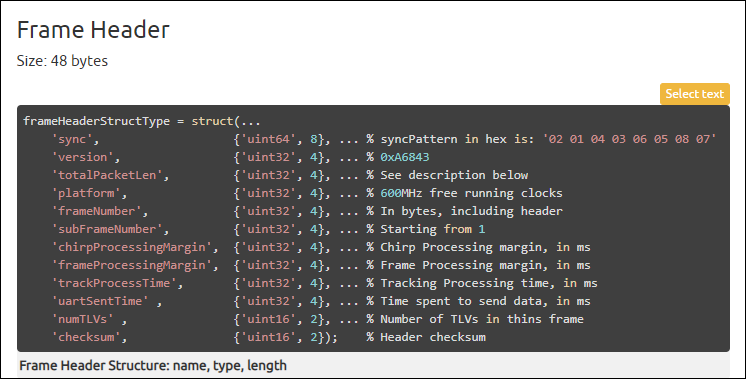
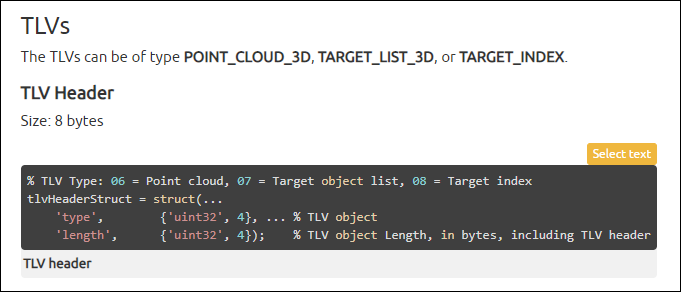
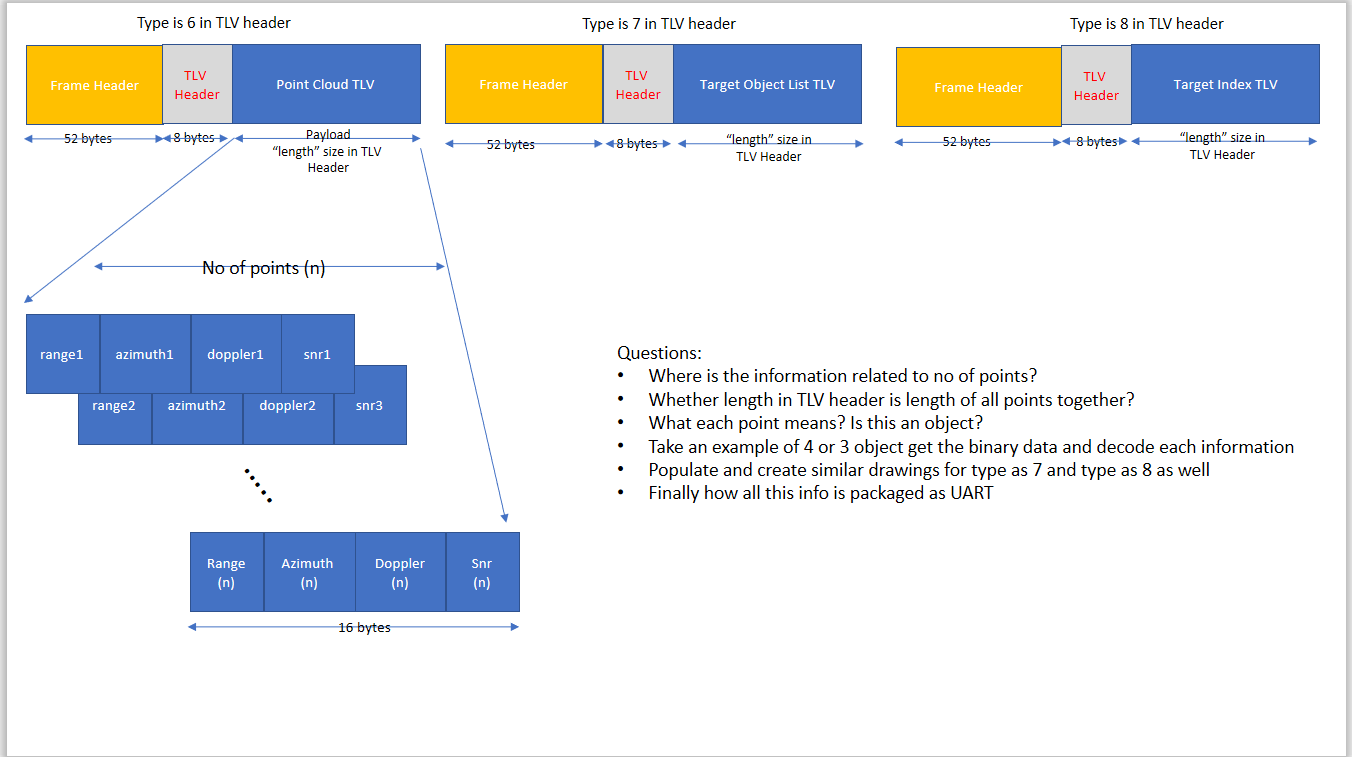
I have binary data, which is available in people count document. i want to identify the data from that binary frame. here i am attaching data format screenshot. i want to know, how the data is captured. for example here we took people count scenario. how people is counting using mmwave sensor and TLV's is formed. in the screenshot the data is repeated it means number of objects. what is the mean of point_cloud, target_objects and target_index. i am attaching one more screenshot that is my assumption, is this right way to represent. Please do the needful.

Regards,
Srikanth