Hi!
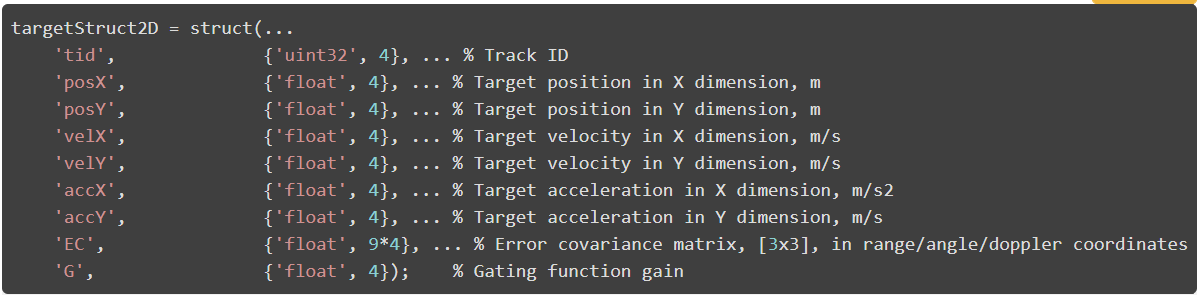
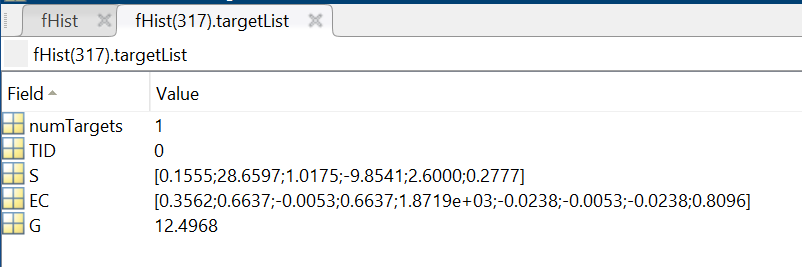
I have been working with the IWR1642BOOST EVM's traffic monitoring lab from the industrial toolbox 3.6.2 and upon running the simulation have attained some fHistRT MATLAB files containing the scenes data. I am unsure if there is a document explaining each of the fields within the MATLAB structure file so am wondering if somebody could please point me to it, or please explain what each fields data represents.
I am mostly looking for:
- Targets range, angle and velocity (not point cloud data only identified targets)
- Potentially estimated size of the vehicle (if possible)
Thank you heaps in advance :)