Other Parts Discussed in Thread: IWR1642, IWR6843
Hi,
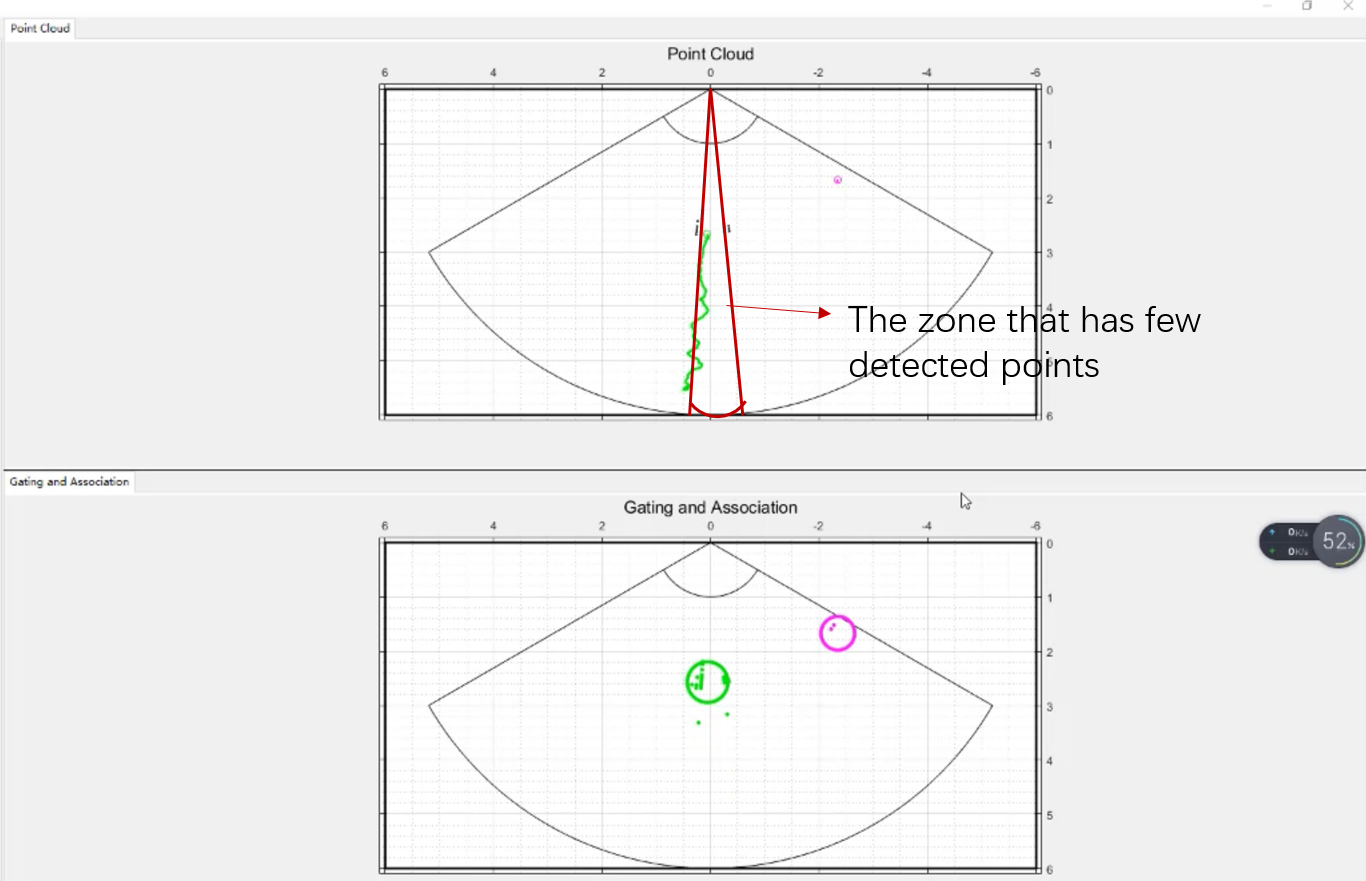
I ran the pplcount demo with IWR1642 and I found that the number of detected objects drops dramatically at the lacation around (0.2, 4) which resulted in the break of tracking and the miscount of people number.
The below figure shows the problem. I would like to know the reason for this problem. It is said in TI's training document that "The angle estimation is most accurate at θ close to zero.", which seems conflit with the my observation.

Regards,