


360 Degree Safety Bubble with IWR6843ISK
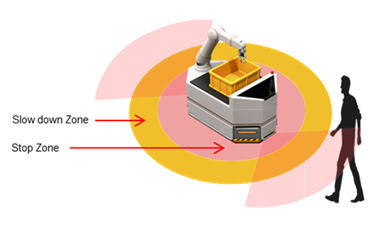
The new lab 360° Safety Bubble for ROS has just been released on the TI Resource Explorer as part of the mmWave Industrial Toolbox 4.5.1. This lab leverages 4x IWR6843ISK EVMs to create a 360 degree safety bubble around the moving robot for human/obstacle presence detection and collision avoidance. This basically entails creating configurable warning (yellow) and danger (red) zones as shown below for slowing down and stopping the robot when a person/obstacle is detected within those zones in the safety bubble:
Some of the key capabilities/supported features of this lab have been captured below:
- 360 degree surround view for human/obstacle presence detection up to a max range of 10m - this range can be configured depending on customer requirement.
- Configurable 2m slow down zone allows robot to start slowing down (early collision avoidance warning) when a human/obstacle is detected anywhere within a 2m radius around the robot.
- Configurable 1m stop zone allows robot to stop when a human/obstacle is detected anywhere within a 1m radius around the robot.
For more details on this lab, please see the Frequently Asked Questions below or refer to the Lab user’s guide.

