


Other Parts Discussed in Thread: IWR1443BOOST
Hello,
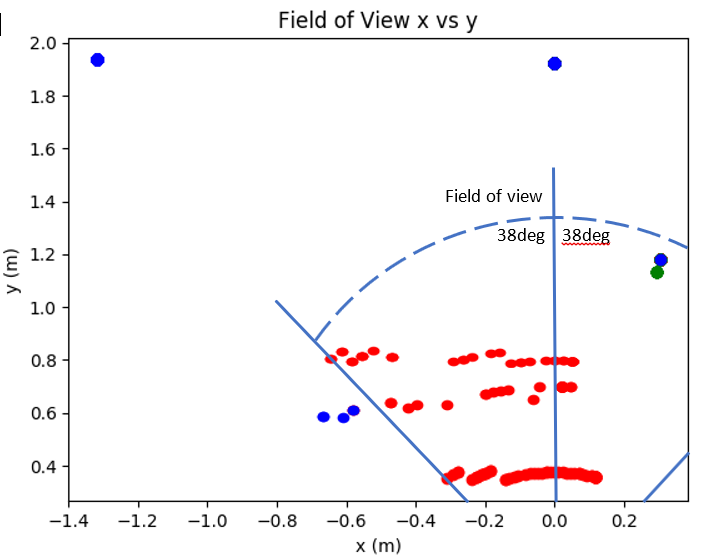
I have just started testing the mmWave sensor on the development board. I am parsing the serial data that is sent when the out-of-the-box demo is running on the board. I can see the X and Y 2-byte fields showing accurate positions. Using them, I was able to determine the horizontal field of view of the sensor. I also want to find the vertical field of view, for which I need the Z values. However, the Z field is always 0 for all objects in all data frames. Is this a limitation of the demo itself? How can I go about configuring the sensor to output the Z values for all objects?
Here's a diagram of the horizontal field of view. There are three trials superimposed on one graph, where I slowly bring an object closer to the coordinate y-axis where the sensor is located at the origin. I want to accomplish something similar for the vertical field of view.
The sensor configuration file is attached. profile.cfg
Thanks for your time.
Herman
