Tool/software: Code Composer Studio
Hello,
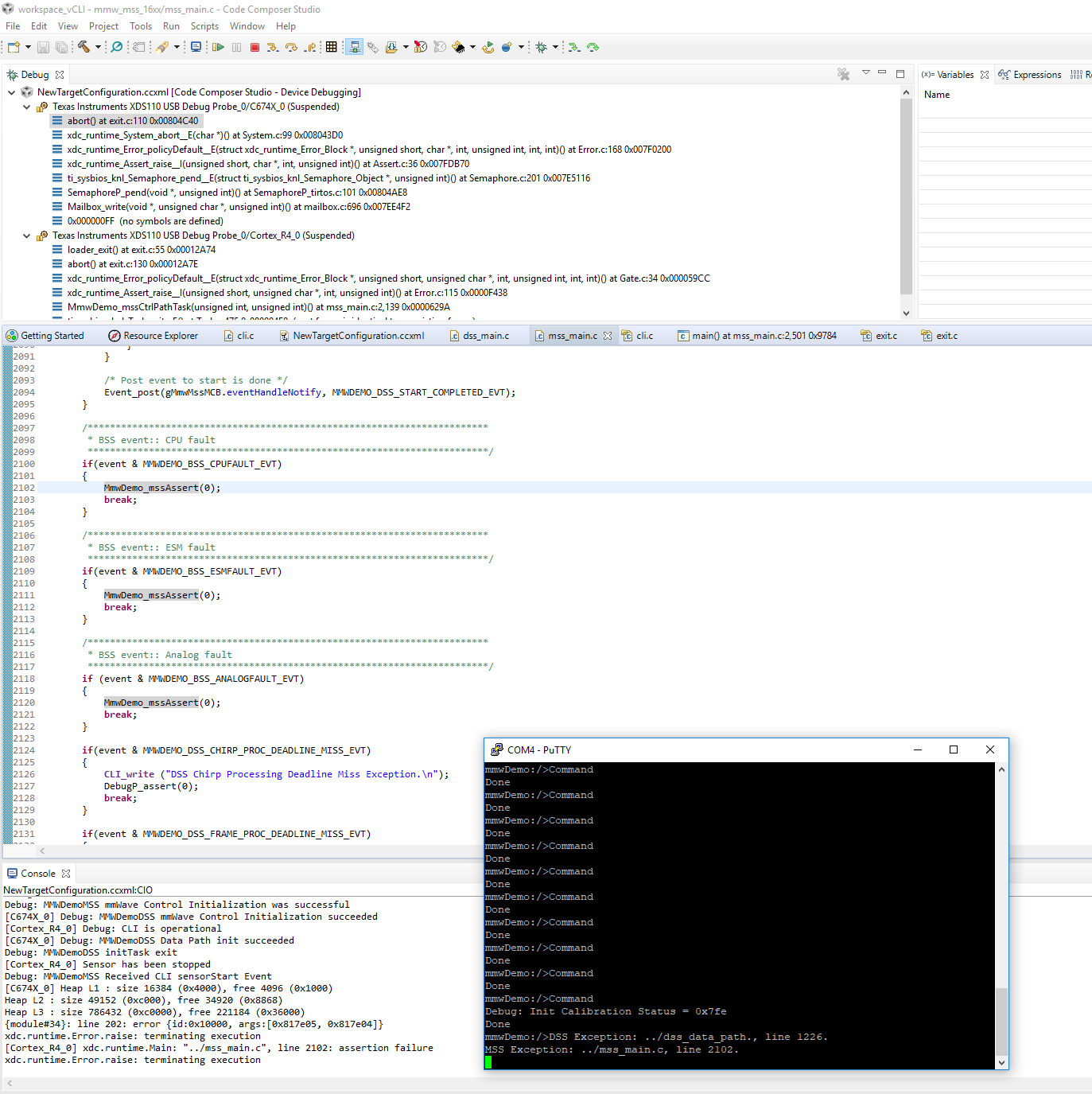
I am trying to hard-code all the configuration commands in the code needed to run mmwave-demo project using IWR1642 board. The idea is not to rely on demo visualizer or the Command line interface (to type configuration commands) to configure the board every time I power it up. Can you please guide me how to do it?
Regards,
Attiya