Hi,
I did traffic monitoring demo in lab13 of mmwave_industrial_toolbox_3_6_1.
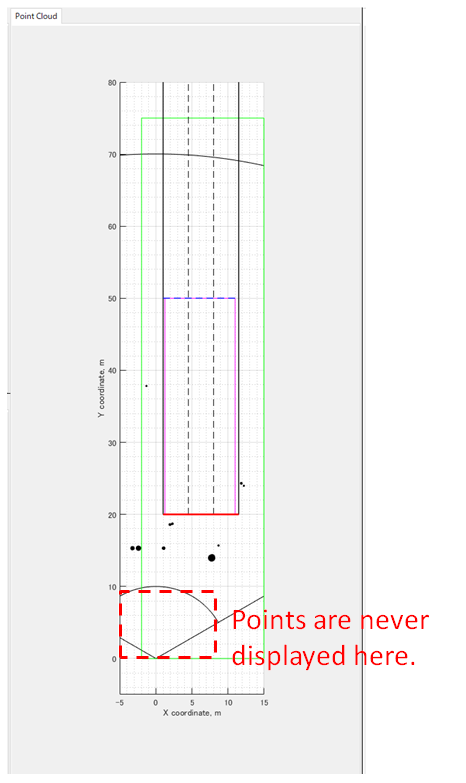
When I run GUI demo app(tm_demo.exe), I can see points in the area far from radar(range > 6m).
However, I cannot see points in the area near from radar(range < 6m).
Is there any software implementation that cuts off points whose range value is small?
Any work around to obtain points near from radar?
Best regards,
Fields