


Other Parts Discussed in Thread: IWR6843
Tool/software: TI C/C++ Compiler
Hi Team
I am using multiple gesture and motion detection demo of iwr6843. The toolbox is mmwave_industrial_toolbox_4_4_1 .
in the mss_data_path.h: #define SEND_FEATURE_VECTORS_OUT_ON_UART 1

in the dss_main.c : MmwDemo_dssSendProcessOutputToMSS ,I modified as follows:(blue )
#if 0
gestureMetrics[idx] = 0x1234; idx ++;
gestureMetrics[idx] = gestureCntr++; idx ++;
gestureMetrics[idx] = gfeatures.pWtdoppler; idx ++;
gestureMetrics[idx] = gfeatures.pWtdopplerPos; idx ++;
gestureMetrics[idx] = gfeatures.pWtdopplerNeg; idx ++;
gestureMetrics[idx] = gfeatures.pwtaz_mean; idx ++;
gestureMetrics[idx] = gfeatures.pwtel_mean; idx ++;
gestureMetrics[idx] = gfeatures.pNumDetections; idx ++;
gestureMetrics[idx] = gfeatures.pwtaz_std; idx ++;
gestureMetrics[idx] = gfeatures.pwtel_std; idx ++;
gestureMetrics[idx] = gfeatures.pWtrange; idx ++;
gestureMetrics[idx] = gfeatures.numCycles; idx ++;//idx = 12
#else
gestureMetrics[idx] = 0x1234; idx ++;
gestureMetrics[idx] = 0x5678; idx ++;
gestureMetrics[idx] = 0x1234; idx ++;
gestureMetrics[idx] = 0x5678; idx ++;
gestureMetrics[idx] = 0x1234; idx ++;
gestureMetrics[idx] = 0x5678; idx ++;
gestureMetrics[idx] = 0x1234; idx ++;
gestureMetrics[idx] = 0x5678; idx ++;
gestureMetrics[idx] = 0x1234; idx ++;
gestureMetrics[idx] = 0x5678; idx ++;
gestureMetrics[idx] = 0x1234; idx ++;
gestureMetrics[idx] = 0x5678; idx ++;
#endif
mss_main.c :MmwDemo_mboxReadTask (),send feature vector to uart
{
#if SEND_FEATURE_VECTORS_OUT_ON_UART
/* Send the feature vectors. */
UART_writePolling(gMmwMssMCB.loggingUartHandle,
(uint8_t*)SOC_translateAddress(message.body.detObj.tlv[0].address,
SOC_TranslateAddr_Dir_FROM_OTHER_CPU, NULL),
message.body.detObj.tlv[0].length);
#endif
}
But I received the data as shown below, not 0x1234 and 0x5678, can you help me explain the reason?
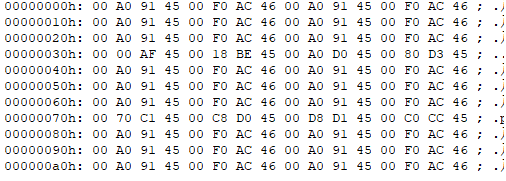
Because we want to send the feature vector to the pc and send it to the neural network for processing,
so enable SEND_FEATURE_VECTORS_OUT_ON_UART ,then we found the data received by uart is not right;

