Other Parts Discussed in Thread: IWR1642
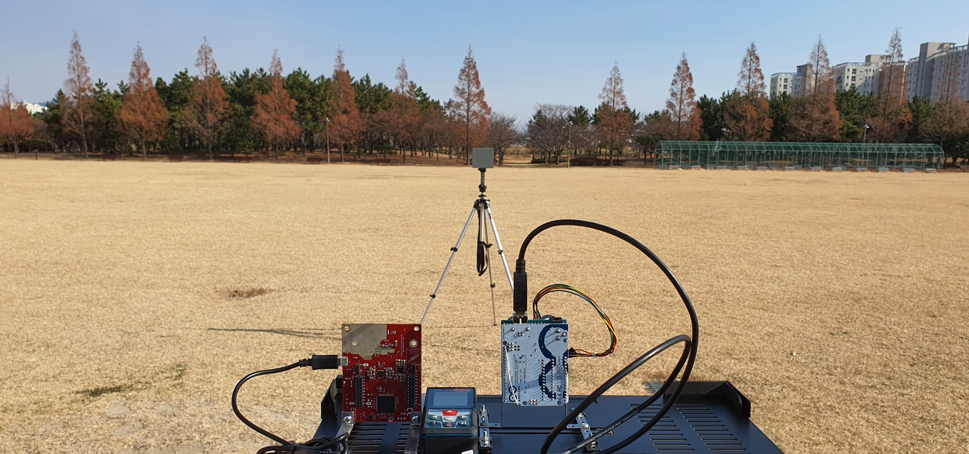
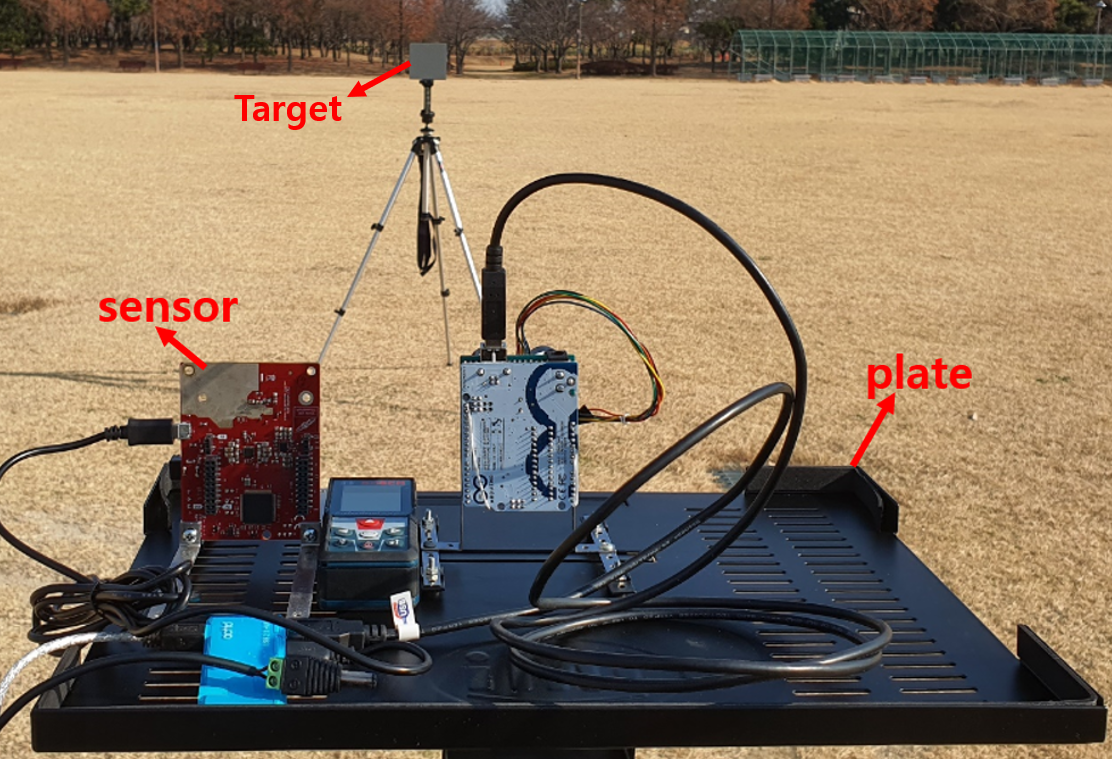
I tested with IWR1642BOOST to detect small objects in open ground.
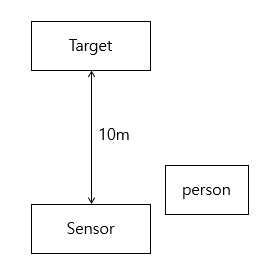
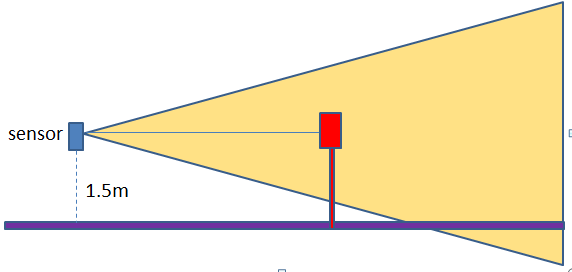
15x15cm target was placed at 10m.
CLI configuration is below: (set active frame time high)
% ***************************************************************
% Created for SDK ver:03.04
% Created using Visualizer ver:3.4.0.0
% Frequency:77
% Platform:xWR16xx
% Scene Classifier:best_range_res
% Azimuth Resolution(deg):15
% Range Resolution(m):0.039
% Maximum unambiguous Range(m):31.49
% Maximum Radial Velocity(m/s):2.34
% Radial velocity resolution(m/s):0.3
% Frame Duration(msec):100
% Range Detection Threshold (dB):15
% Doppler Detection Threshold (dB):15
% Range Peak Grouping:enabled
% Doppler Peak Grouping:enabled
% Static clutter removal:disabled
% Angle of Arrival FoV: Full FoV
% Range FoV: Full FoV
% Doppler FoV: Full FoV
% ***************************************************************
sensorStop
flushCfg
dfeDataOutputMode 1
channelCfg 15 3 0
adcCfg 2 1
adcbufCfg -1 0 1 1 0
profileCfg 0 77 8 7 200 0 0 20 1 1008 5250 0 0 30
chirpCfg 0 0 0 0 0 0 0 1
chirpCfg 1 1 0 0 0 0 0 2
frameCfg 0 1 16 0 100 1 0
lowPower 0 1
guiMonitor -1 1 1 0 0 0 1
cfarCfg -1 0 2 8 4 3 0 15 1
cfarCfg -1 1 0 4 2 3 1 15 1
multiObjBeamForming -1 1 0.5
clutterRemoval -1 0
calibDcRangeSig -1 0 -5 8 256
extendedMaxVelocity -1 0
bpmCfg -1 0 0 1
lvdsStreamCfg -1 0 0 0
compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0
measureRangeBiasAndRxChanPhase 0 1.5 0.2
CQRxSatMonitor 0 3 19 125 0
CQSigImgMonitor 0 125 16
analogMonitor 0 0
aoaFovCfg -1 -90 90 -90 90
cfarFovCfg -1 0 0 31.50
cfarFovCfg -1 1 -2.34 2.34
sensorStart
And changed some command for using BPM scheme instead of TDM-MIMO. changed command is below: (refer ti\demo\xwr16xx\mmw\profiles\profile_2d_bpm.cfg)
adcbufCfg -1 0 1 1 1
chirpCfg 0 0 0 0 0 0 0 3
chirpCfg 1 1 0 0 0 0 0 3
bpmCfg -1 1 0 1
1.
When using the BPM plan, there was no noticeable difference in the range profile value of the visualizer.
How can I confirm that SNR has risen? Is the BPM scheme applied correctly?
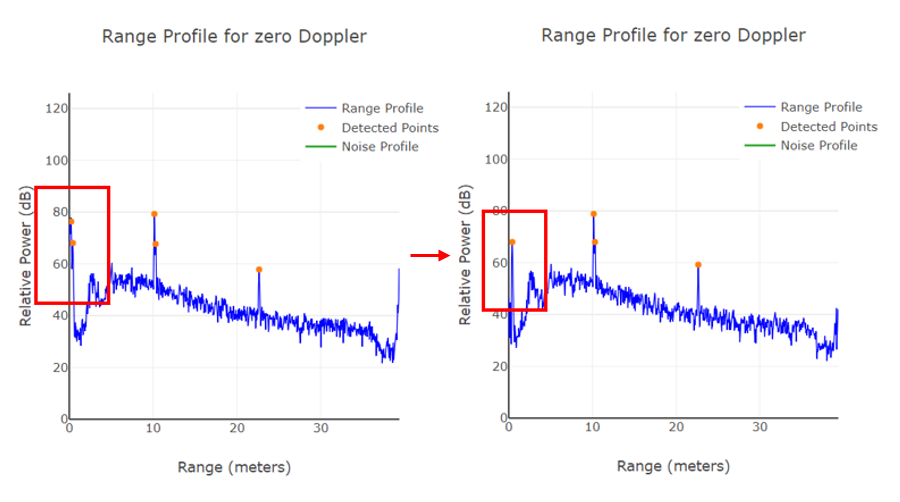
2.
In the above test process, False detection(ghost) appeared. There is only one target at 10m in front of the device
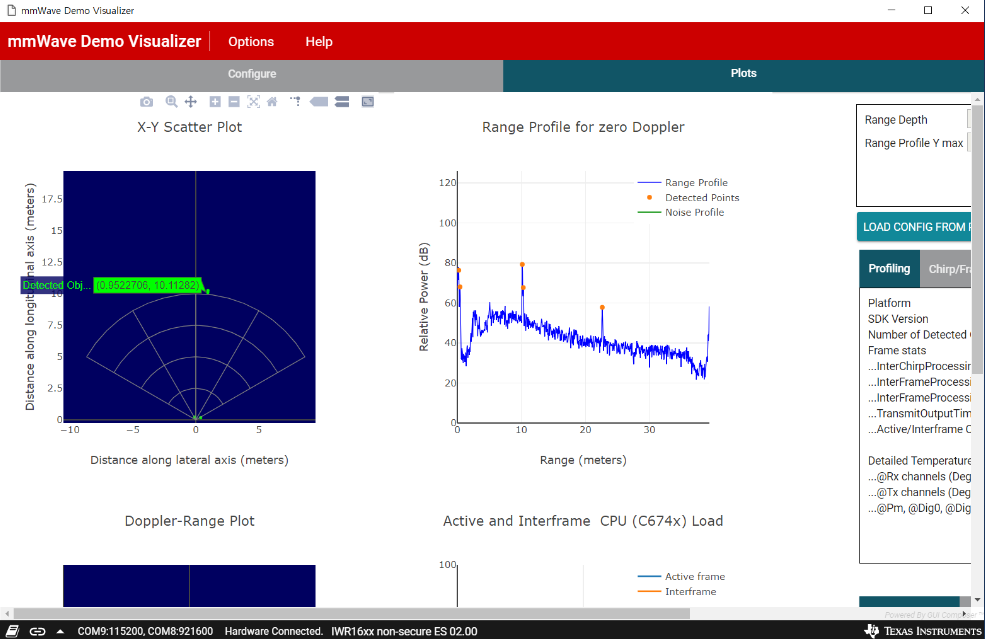
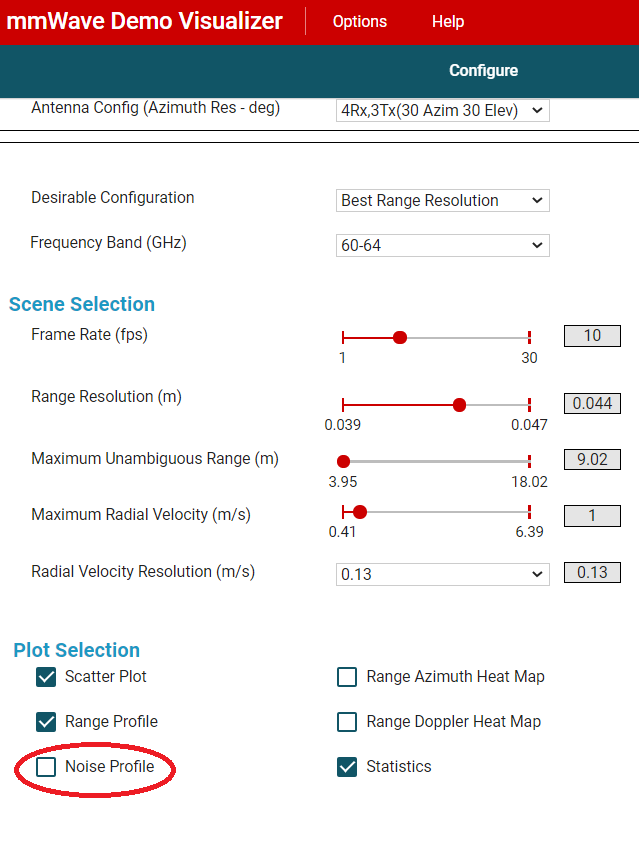
The antenna coupling signature was removed through the calibDcRangeSig command, but the result was as follows.
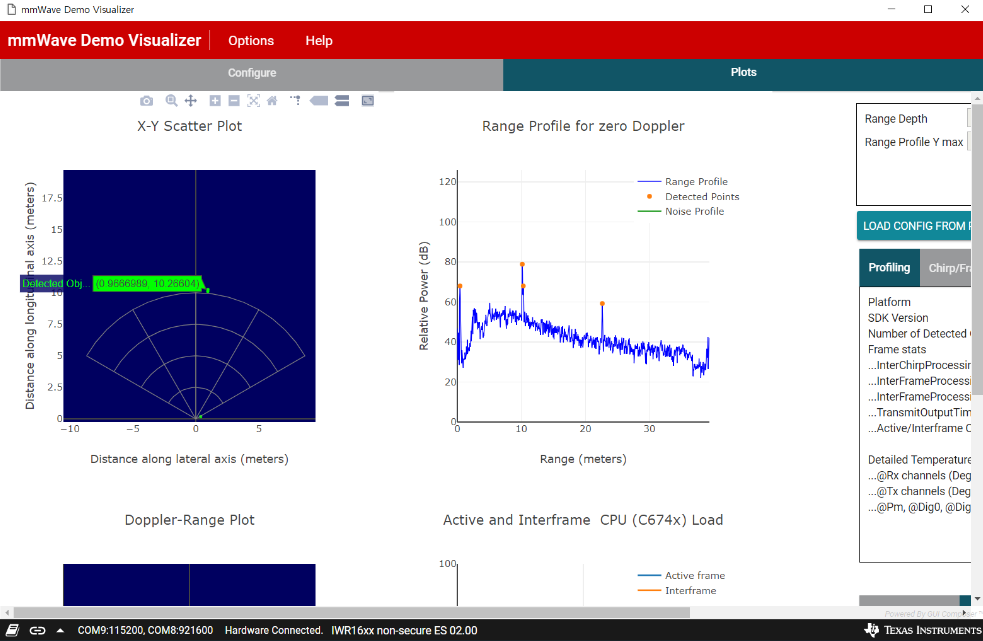
How can I get rid of this false detections?
3.
profileCfg 0 77 287 7 200 0 0 20 1 1008 5250 0 0 30
frameCfg 0 1 16 0 100 1 0
About this configuration, I understand that number of range FFT bins = 1024, (because numAdcSample parameter is 1008) number of doppler FFT bins = 16 (because numLoops parameter is 16).
Is my understanding correct?
Thanks.