


Hi I am trying out the traffic monitoring demo and when I am sending the cfg file there are some errors and some skipped parsing:

Not sure why they are the case since I used the cfg file in the chirp config folder instructed by the userguide
also another problem:
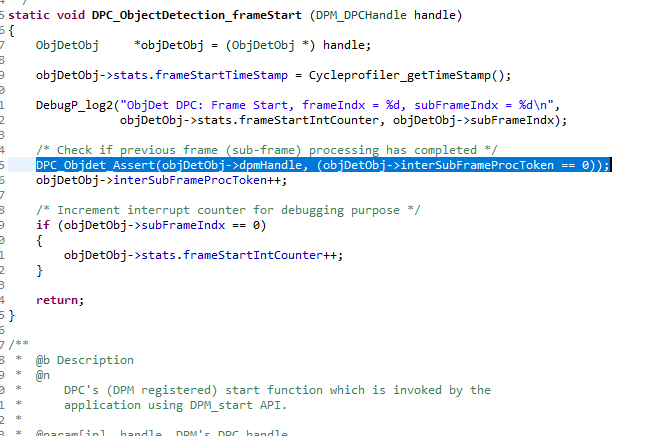
the visualiser stopped updating new info and got stuck if there are a lot of targets and if I move the sensor, I debugged the source code and it aborted, looks like the source is this assert in objectdetection.c:
Does anyone know how to resolve this issue?
I am using the mmwave_sdk_03_05_00_04 and industrial toolbox 4.5.1
thanks in advance!

