Other Parts Discussed in Thread: DCA1000EVM
Hi Team,
Good day. Kindly assist our customer's inquiry below:
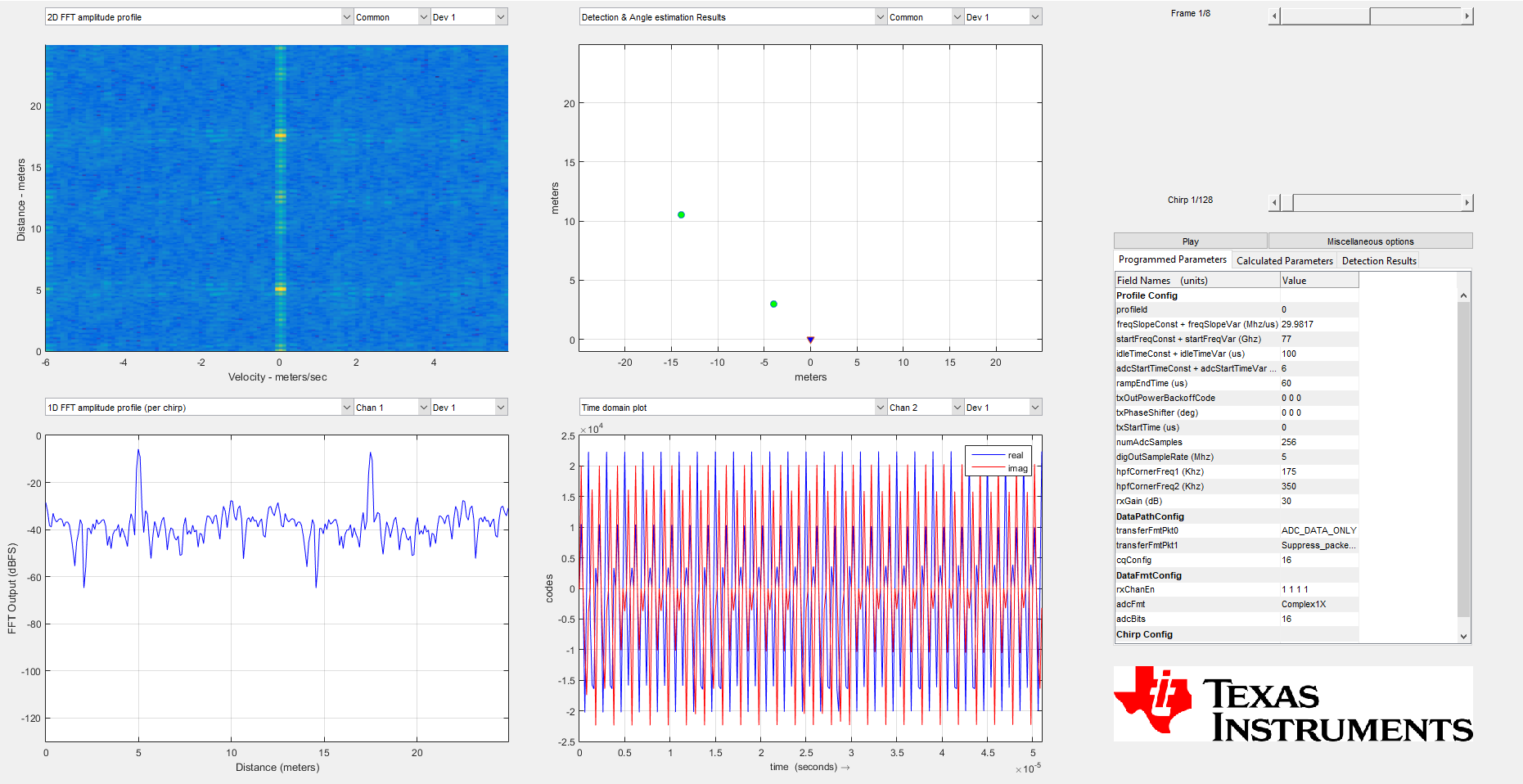
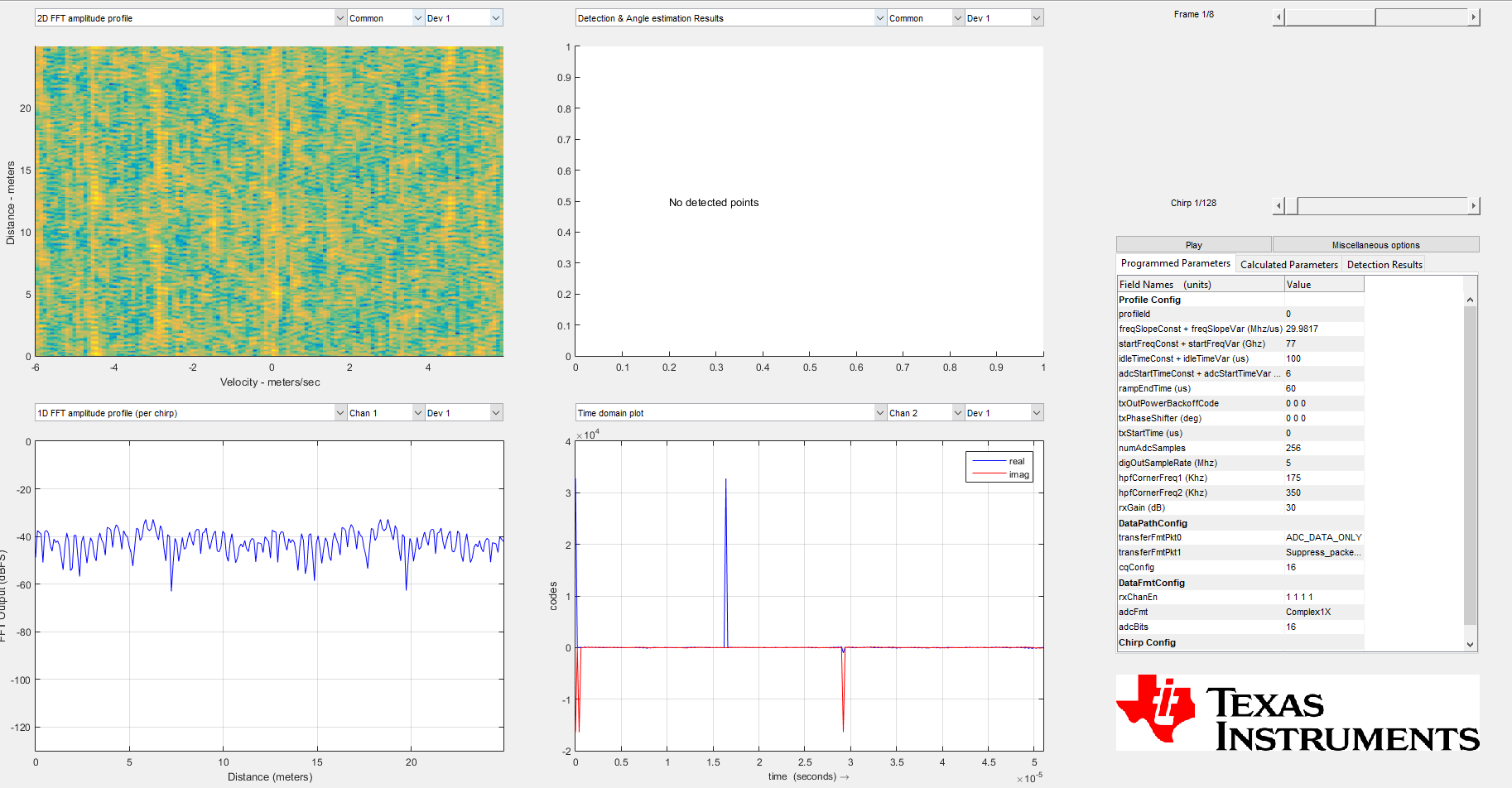
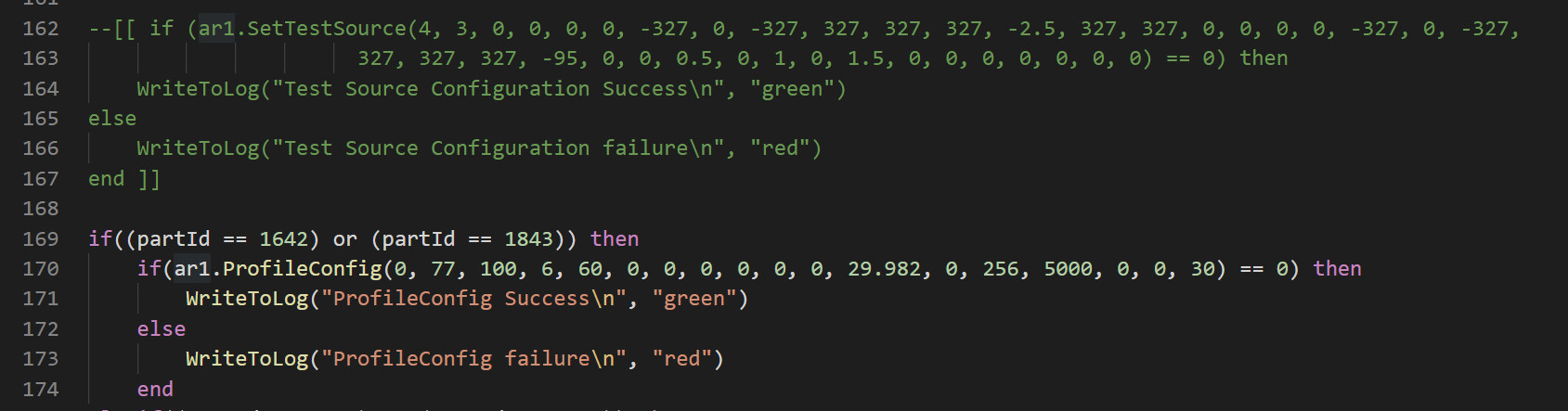
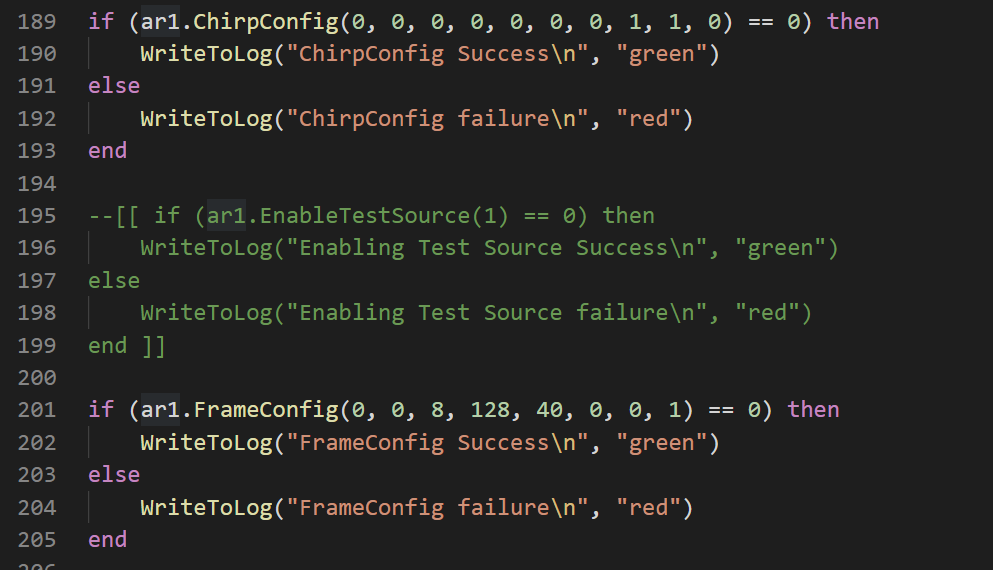
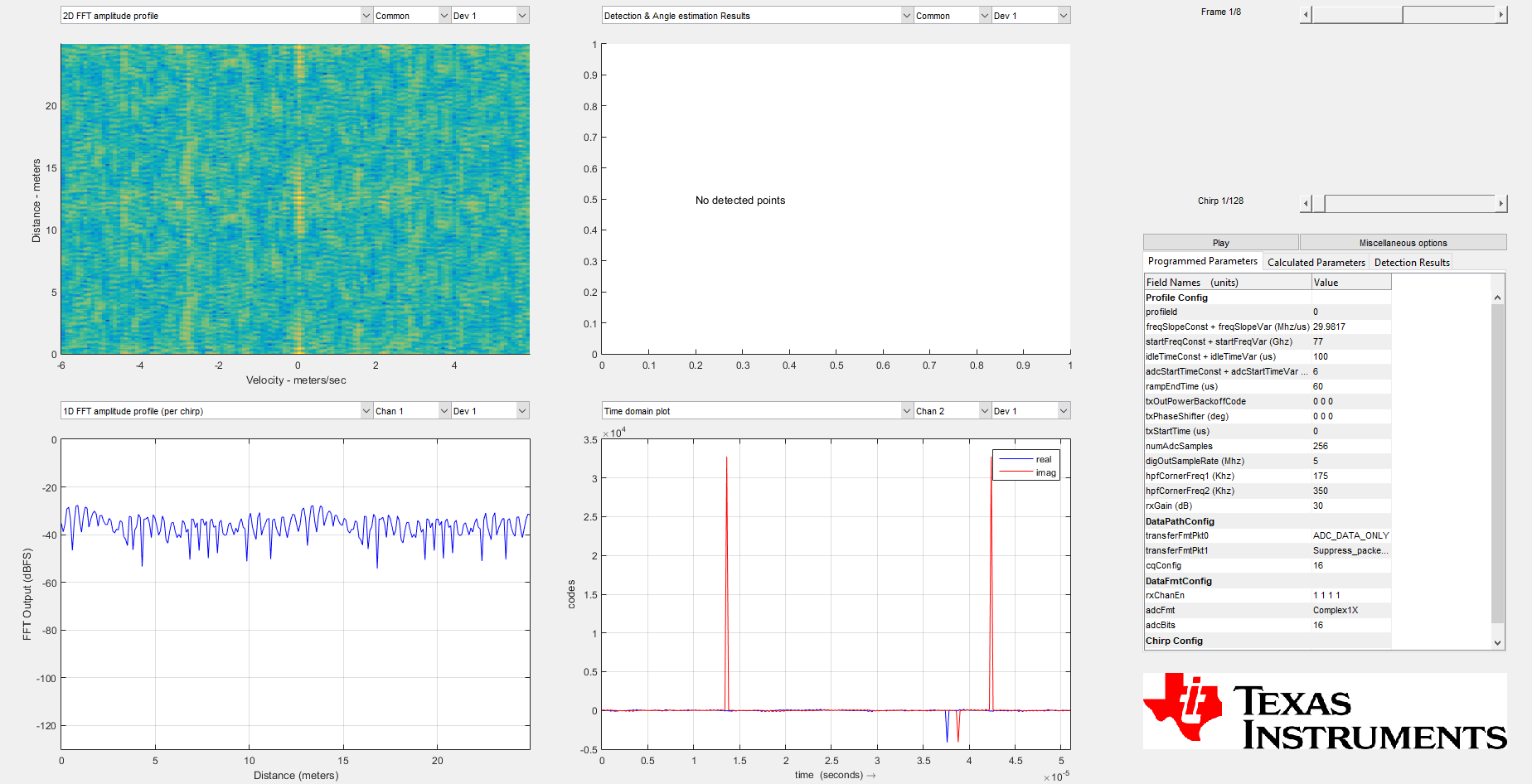
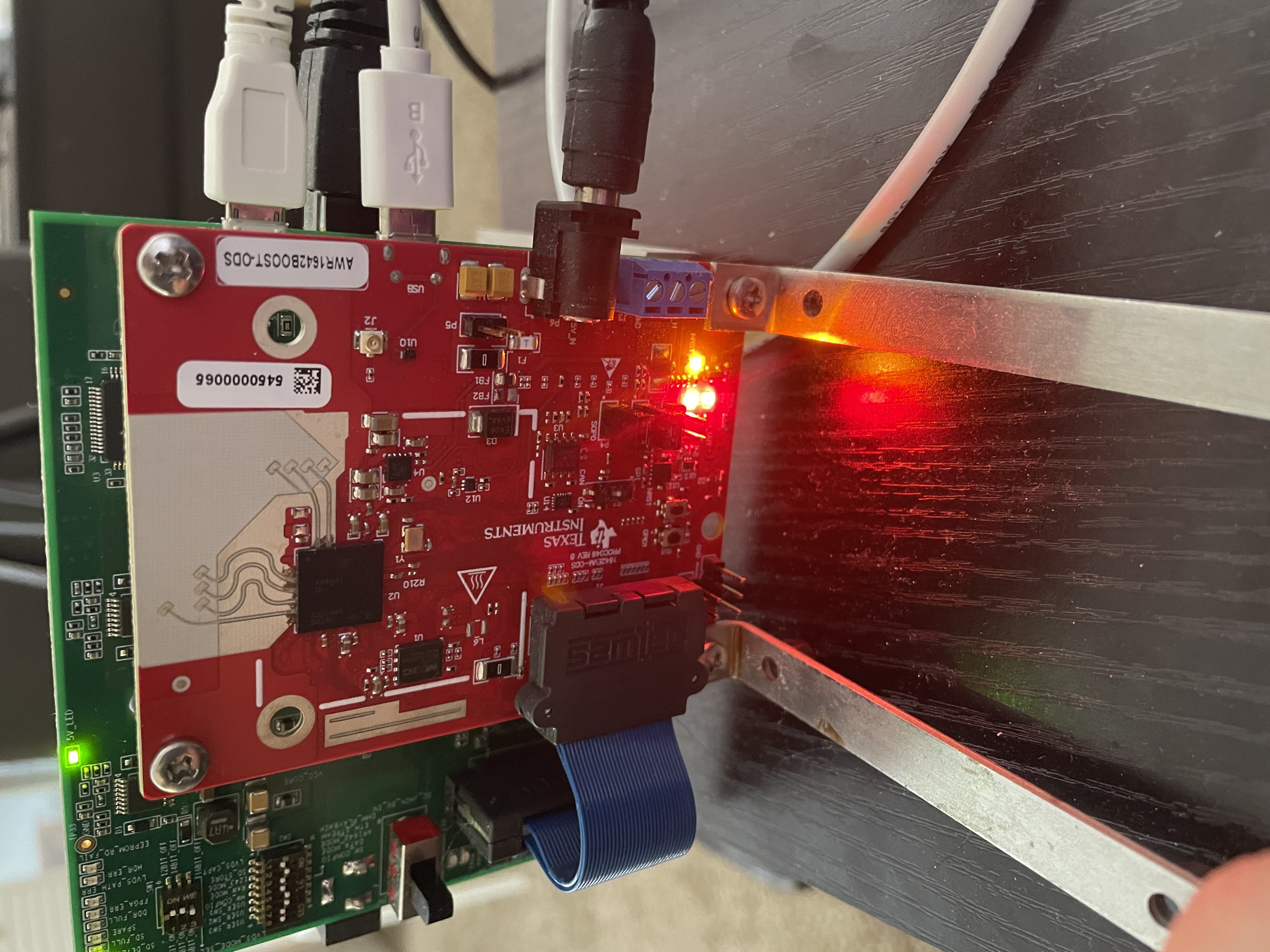
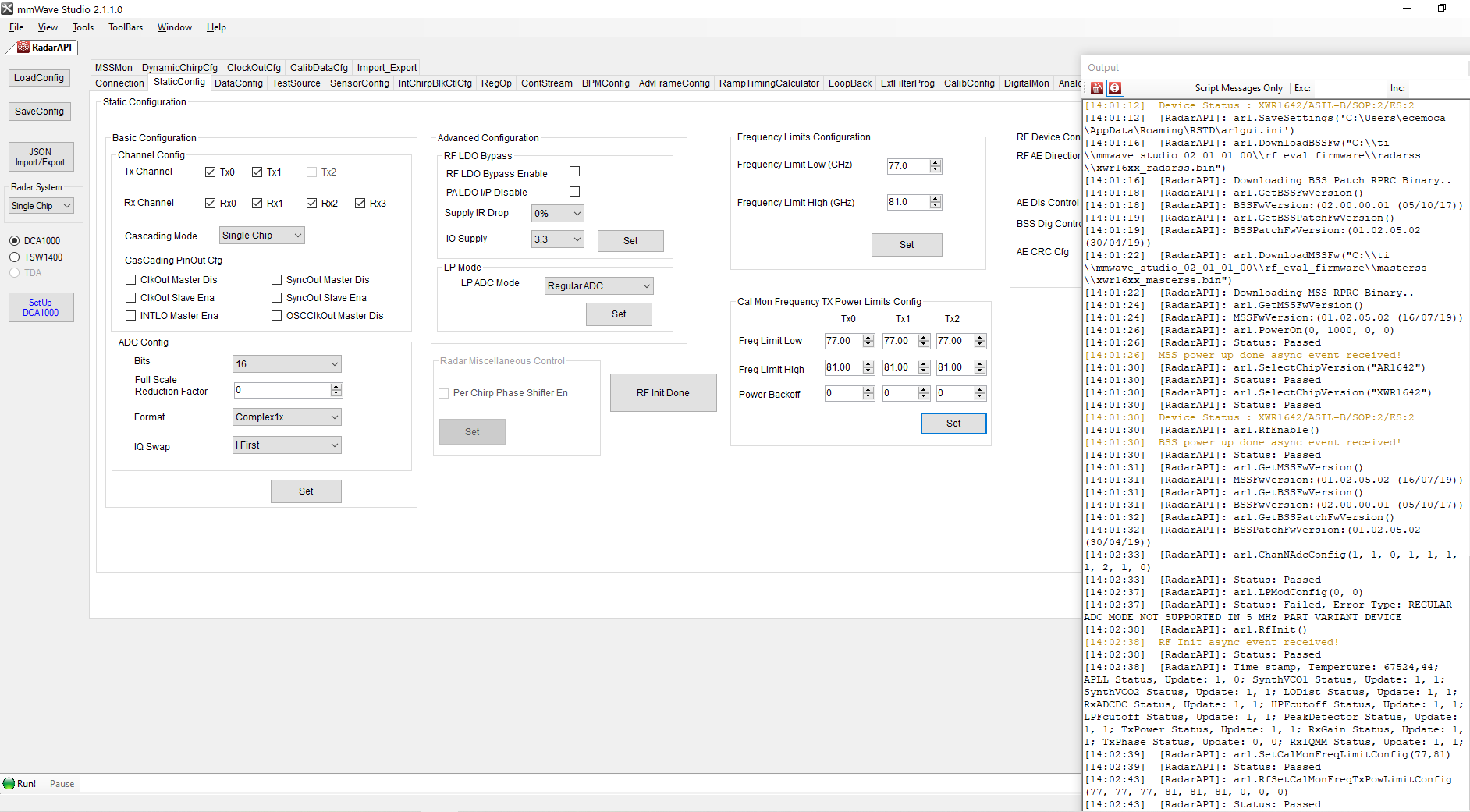
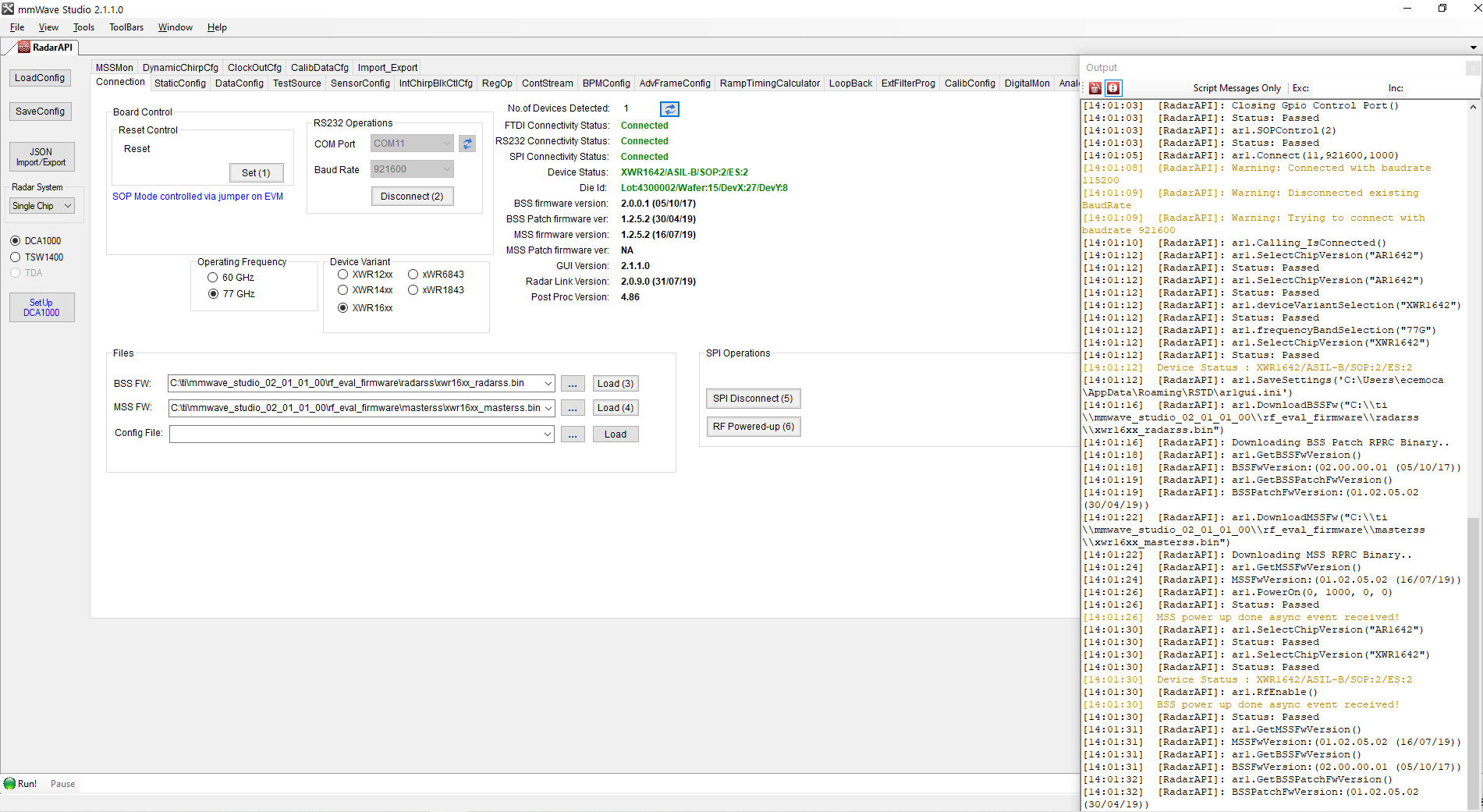
I have question related to my mmwave awr1642. I can't get correct range doppler figure using awr1642 and dca1000 with mmwave studio. I follow the extra steps in the DCA1000 Training Video on training.ti.com/dca1000-training-video, but still got the strange range doppler for awr1642 but the 1642 board can get correct range doppler through demo visualizer using the firmware in the sdk.

We are looking forward to your response and thank you for the usual support. Have a great day.
Best regards,
Jonathan