


Other Parts Discussed in Thread: MSP430G2553
Tool/software: Code Composer Studio
hi, i was using msp430 in CCSv7......i was getting the following errors
1. .h file includes itself
2. gmake[main.obj]
3. target all not remade because of 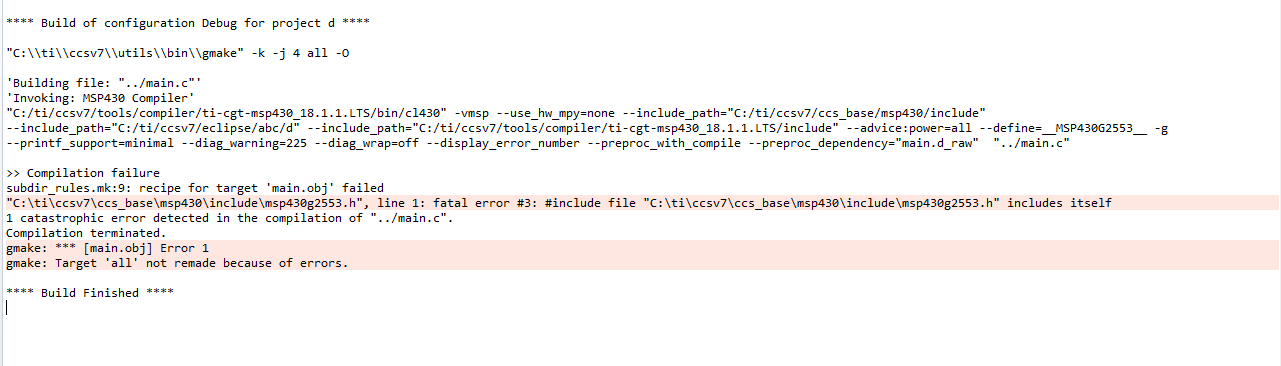 errors
errors
Other Parts Discussed in Thread: MSP430G2553
Tool/software: Code Composer Studio
hi, i was using msp430 in CCSv7......i was getting the following errors
1. .h file includes itself
2. gmake[main.obj]
3. target all not remade because of errors
