



Hello David,
As per your link provided for the CAN example in the other threads, we have downloaded, imported to CCS, compiled and flashed to TIDA-020032 board.
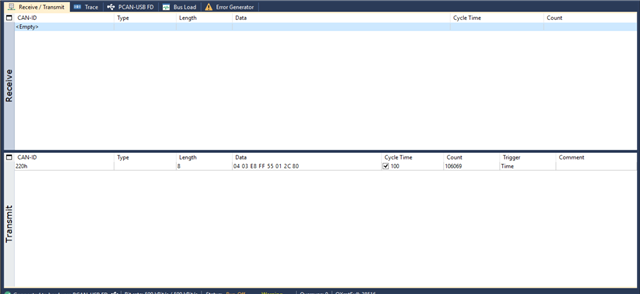
We have connected PEAK_CAN simulator to TIDA-020032 board to monitor the CAN messages.
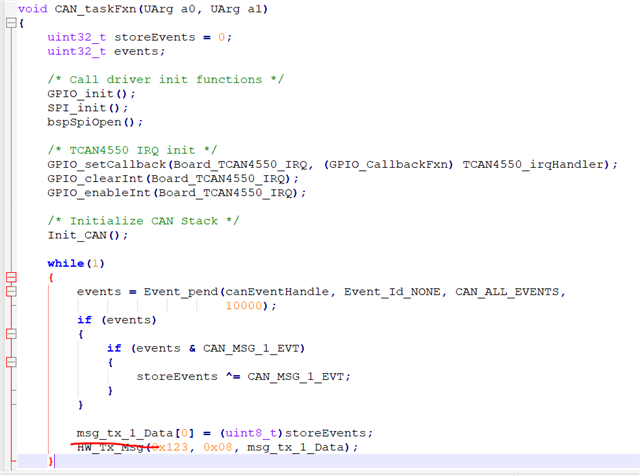
We are able to see that the break-point is hitting the below function, but we are not able to see Transmit messages getting received on PEAK-CAN simulator.
Can you pls help us if we are missing anything in this process?
Is there anyway we can confirm that CAN message transmission is happening?
