A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
You can refer to SmartRF06EB user guide (www.ti.com/.../swru321a.pdf). RF1.7 and RF1.9 are on P412 which should be on right-bottom corner of SmatRF06EB.
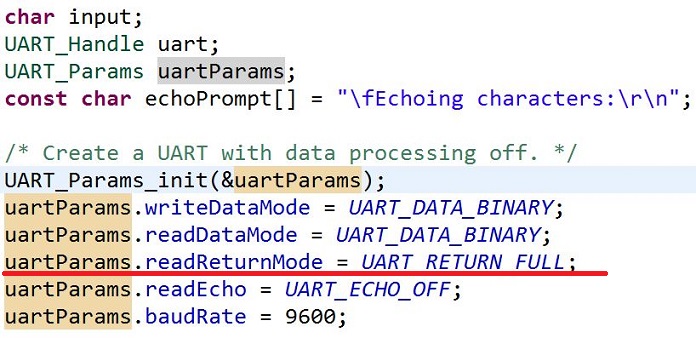
1. readReturnMode can be set to UART_RETURN_FULL or UART_RETURN_NEWLINE. UART_RETURN_FULL unblocks or performs a callback when the read buffer has been filled. UART_RETURN_NEWLINE unblocks or performs a callback whenever a newline character has been received.
2. When you type a char on UART terminal, UART_read will receive that char.
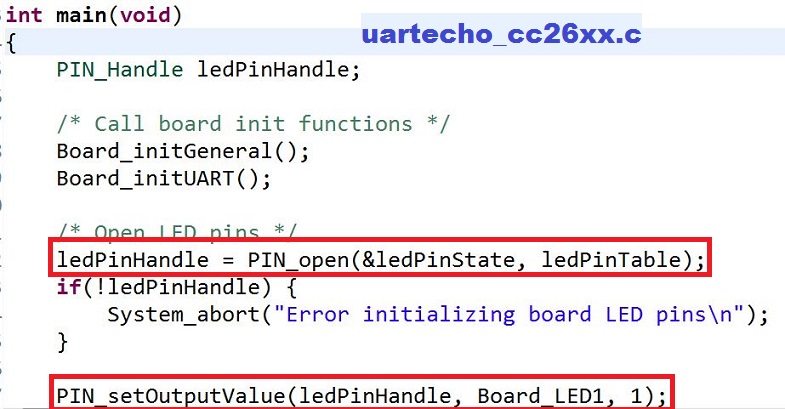
3. Yes, Board_initUART is necessary.
About 2 : When you type a char on UART terminal, UART_read will receive that char.
If I connect another sensor use UART_RX and UART_TX , I refer this code :
------------------------------------------------------------------------------------------------
String inputstring = ""; //a string to hold incoming data from the PC
String sensorstring = ""; //a string to hold the data from the sensor
boolean input_string_complete = false; //have we received all the data from the PC
boolean sensor_string_complete = false; //have we received all the data from the sensor
float sensorValue;
inputstring.reserve(10); //set aside some bytes for receiving data from the PC
sensorstring.reserve(30); //set aside some bytes for receiving data from sensor
void serialEvent()
{
inputstring = Serial.readStringUntil(13); //read the string until we see a <CR>
input_string_complete = true; //set the flag used to tell if we have received a completed string from the PC
}
if (input_string_complete){ //if a string from the PC has been received in its entirety
myserial.print(inputstring); //send that string to the sensor
myserial.print('\r'); //add a <CR> to the end of the string
inputstring = ""; //clear the string
input_string_complete = false; //reset the flag used to tell if we have received a completed string from the PC
} end of if
if (myserial.available() > 0) { //if we see that the sensor has sent a character
char inchar = (char)myserial.read(); //get the char we just received
sensorstring += inchar; //add the char to the var called sensorstring
if (inchar == '\r') { //if the incoming character is a <CR>
sensor_string_complete = true; //set the flag
}
} //end of if
if (sensor_string_complete = = true) { //if a string from the sensor has been received in its entirety
Serial.println(sensorstring); //send that string to the PC's serial monitor
if (isdigit(sensorstring[0])) ; //if the first character in the string is a digit
sensorValue = sensorstring.toFloat(); //convert the string to a floating point number
if (sensorValue >= 7.0) {
printf("high");
}
}
I want to see sensorValue on my Serical port , how modify that code ? Thank you.
you mean I can use that fxn to add SimpleBLEPeripheral.c :
static void SimpleBLEPeripheral_init(void)
{
....................
Void echoFxn(UArg arg0, UArg arg1);
........................
}
or I create a new task behind SimpleBLEPeripheral_init fxn?
static void SimpleBLEPeripheral_init(void)
{
...........
...........
} //end of SimpleBLEPeripheral_init
Can you please describe what your desired result is in words. From what I understand you want to add a PH sensor to the SensorTag and you're trying to adapt some Arduino code to the SensorTag?
Hello Sean2:
Yes , I do really use CC2560 to connect PH sensor via UART , But I only have Arduino code can reference.
I ask sensor supplier about sample code , they tell me only arduino code can refer. they also tell me , the sensor
only use RX and TX to connect SmartRF06 EVM Board UART_RX and UART_TX , It's easy.
So , I refer uartecho sample code , and modify SimpleBLEPeripheral sample code .
In fact , my purpose is very simple , just read sensor data via UART , That's all , but I try almost three weeks ,
no progress.
In section 6.3.2 UART of SWRU393_CC2640_BLE_Software_Developer's_Guide.pdf, it shows you how to add UART support to SimpleBLEPeripheral. Why don't you use it?
Hello Yikai:
I did really add section 6.3.2 UART on SimpleBLEPeripheral_inin(void) fux ,
and it's OK , but if I am not connect any sensor to CC2650 , that code will stop on
UART_write(....) , it waiting UART data , so I think, if I create another task ,
maybe even the CC2650 can't read UART data , the process can still continue.
Thank you very much , the fxn is OK , at the same time , I also display data on LCD ,
It's need to add
#include "board_lcd.h"
then I can use
LCD_WRITE_STRING(....)
Thank you again.