
- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
xdc.useModule('ti.drivers.Driver');) will fail during the configuration phase of the build. These statements should be removed from the configuration file.TIRTOS.useUART = true; statements) will generate warnings during the configuration phase. While these will not terminate the build process, they should be removed if a warning-less build is desired./* ================ TI-RTOS drivers' configuration ================ */
var driversConfig = xdc.useModule('ti.drivers.Config');
/*
* Include TI-RTOS drivers
*
* Pick one:
* - driversConfig.LibType_NonInstrumented (default)
* Use TI-RTOS drivers library optimized for footprint and performance
* without asserts or logs.
* - driversConfig.LibType_Instrumented
* Use TI-RTOS drivers library for debugging with asserts and logs enabled.
*/
driversConfig.libType = driversConfig.LibType_NonInstrumented;
//driversConfig.libType = driversConfig.LibType_Instrumented;Changes to:
Changes to:
PowerCC3200_sleepPolicy() has been rewritten. The new policy uses the SYSTICK timer (ti.sysbios.family.arm.m3.Timer) while the CPU is active, and will re-sync and restart this timer upon wakeup from LPDS. The RTC timer (ti.sysbios.family.arm.cc32xx.Timer) is no longer used, and is no longer selected when the Power driver (ti.drivers.Power) is used.Previously Power was statically configured as other kernel modules are, via the application configuration (.cfg) file. Now that Power exists as a TI-RTOS driver module, configuration follows the same approach as for other drivers. This is accomplished via a structure definition in TI-RTOS board files. Board files in the new TI-RTOS release (e.g., “CC2650DK_7ID.c”) include a PowerCC26XX_config structure, with these default values:
The default settings choose the aggressive standby policy & enable it via .policyFxn & .enablePolicy respectively (as shown above). RCOSC calibration is enabled by default, due to setting .calibrateFxn to PowerCC26XX_calibrate() & setting .calibrateRCOSC_LF & .calibrateRCOSC_HF to TRUE.
To disable calibration the following changes should be made to the structure: 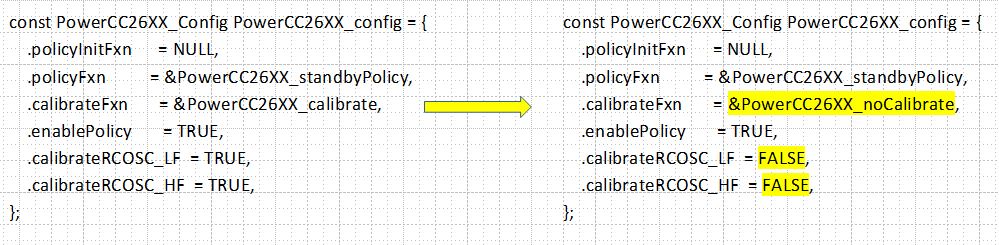
The Power APIs are very similar to those previously available in the kernel module, most changes relate to using standard C types. There are two new header files that must be used & some API signature changes as summarized in the following table. Yellow indicates a function signature change & gray highlights changes from enumerated types to standard C types: 
Note: Return values for the following APIs have changed:
Power_getTransitionLatency() return value is in microseconds.Power_setDependency() now has a void return.Following the model set by other Power drivers, the ti/drivers/Power.h header file contains the standard interfaces for all devices (CC26xx, MSP432 & CC3200) & device-specific headers & implementations are found in the power subdirectory (e.g., ti/drivers/power/PowerCC26XX.h & ti/drivers/power/PowerCC26XX.c). Peripheral & domain resource identifiers now have a "PowerCC26XX_" prefix, as shown below:
 PowerCC26XX resource identifiers
PowerCC26XX resource identifiers
Similarly, constraints & power event identifiers now have a "PowerCC26XX_" prefix, as shown below (a snip from the new header file): 
Changes to:
VStartSimpleLinkSpawnTask() API as the spawn task is now created when calling the WiFi_open() API. A spawnTaskPri field was added to the WiFi_params structure so as to allow the spawn task priority to be changed in the project board file.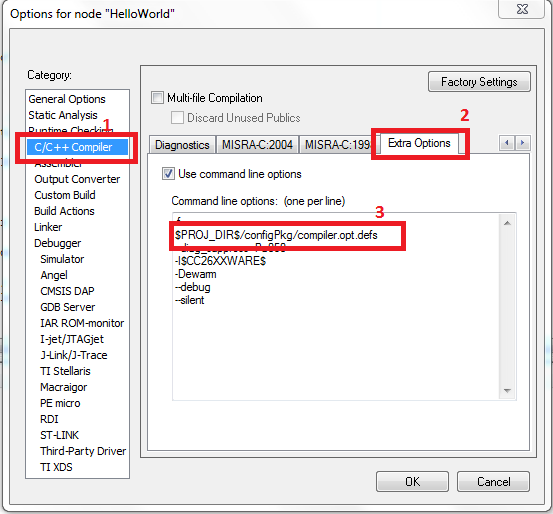 Compiler_opts_def.png
Compiler_opts_def.png
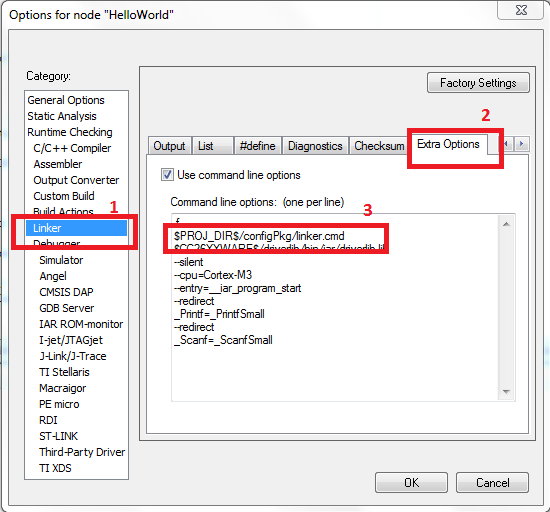 Linker_cmd.png
Linker_cmd.png
 Package_mak.png
Package_mak.png




