


Other Parts Discussed in Thread: SYSCONFIG
Hi,
I’m using CC26x2 Launchpad with SDK v4.40 and BLE 5. (XDC tools: 3.62; SysConfig: version 1.7). I am facing a serious issue with ICall abort in the tasks I've created. Here is the problem:
- I created two tasks (named sensor_thread and Bluetooth_thread) with associated priorities
- Both are ICall registered. However, OSAL SNV api calls in the task “Init function” work only in one of the two tasks
- In the task where OSAL SNV API does not work, ICall_abort is being called by "GGS_SetParameter()" & "osal_snv_read()" API calls
- After debugging by using breakpoints and the "step into tool" in CCS, we think that ICall_abort() is being called due to a timeout through the "icall_directAPI()" in Icall.c.
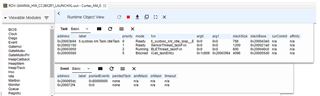
- This is leading to the task situation shown in the below below, which shows the ROV view I'm seeing in CCS:
Icall is being used in the sensor_thread, where it works correctly. The ICall part of the code in this task is coded in the following way:
static void SensorThread_init(void)
{
// ******************************************************************
// NO STACK API CALLS CAN OCCUR BEFORE THIS CALL TO ICall_registerApp
// ******************************************************************
// Register the current thread as an ICall dispatcher application
// so that the application can send and receive messages via ICall to Stack.
ICall_registerApp(&selfEntity, &syncEvent);
// Create an RTOS queue for message from profile to be sent to app.
appMsgQueue = Util_constructQueue(&appMsg);
// Wait for 0.5s for the bluetooth_interface thread to fully start
Task_sleep(50000);
// Read SNV data
if (osal_snv_read(FLASH_NVID_SNV_DATA, sizeof(snv_data_t), &snv_data) != SUCCESS
|| snv_data.commissionFlag == 0) {
snv_data.commissionFlag = 0;
if (pAppCBs && pAppCBs->pfnCommissionCb) {
pAppCBs->pfnCommissionCb(0);
}
Log_warning0("Not commissioned yet!");
}
else {
if (pAppCBs && pAppCBs->pfnCommissionCb) {
pAppCBs->pfnCommissionCb(1);
}
Log_info0("Device has been commissioned");
pulseCounter = snv_data.pulseCounter;
Log_info1("Pulse counter restored to %u", pulseCounter);
}
// Read RTC
if (osal_snv_read(FLASH_NVID_RTC, sizeof(timestampOffset), ×tampOffset) != SUCCESS) {
timestampOffset = 0;
Log_warning0("RTC initialized to 0");
}
else {
Log_warning1("RTC restored to %u", timestampOffset);
}
Icall is also being used in the bluetooth_thread, where it does not work as expected. The ICall part of the code in this task is coded in the following way:
static void BLEThread_init(void)
{
// ******************************************************************
// NO STACK API CALLS CAN OCCUR BEFORE THIS CALL TO ICall_registerApp
// ******************************************************************
// Register the current thread as an ICall dispatcher application
// so that the application can send and receive messages.
ICall_registerApp(&selfEntity, &syncEvent);
Log_info1("PRODUCTION firmware version %s", (IArg) VERSION);
#ifdef USE_RCOSC
RCOSC_enableCalibration();
#endif // USE_RCOSC
Log_info0("Check: BT 721");
// Initialize queue for application messages.
// Note: Used to transfer control to application thread from e.g. interrupts.
Queue_construct(&appMsgQueue, NULL);
appMsgQueueHandle = Queue_handle(&appMsgQueue);
Log_info0("Check: BT 726");
if (osal_snv_read(FLASH_NVID_GLOBAL_PACKET_ID, sizeof(globalPacketID), &globalPacketID) != SUCCESS) {
globalPacketID = 0;
Log_warning0("Global packet ID initialized to 0");
}
else {
Log_warning1("Global packet ID restored to %u", globalPacketID);
}
I have checked that ICALL_MAX_NUM_ENTITIES and ICALL_MAX_NUM_TASKS are 6 and 3. I tried increasing this to 10 and 5, respectively but the same error persists.
We are totally lost as to why Icall() is aborting. Could we please get some help?

