Hi TI,
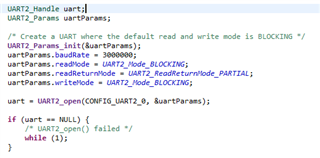
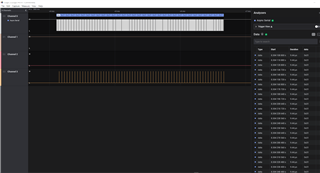
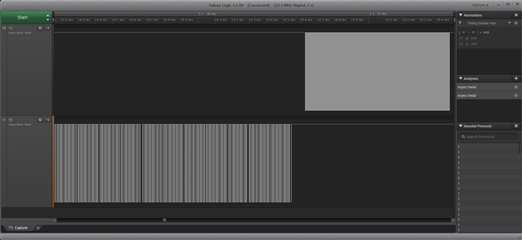
I am attempting to use the UART2 driver but it appears there may be a bug. I am running at 3M baud, and have sniffed the data on a logic analyzer @ 3M baud, and the data on-the-wire appears correct.
When UART2_read returns, I receive the correct number of bytes received (256), but after 50 so bytes, there is incorrect data.
Is this a known issue with UART2 driver?
Thanks,
Ben