Other Parts Discussed in Thread: ENERGYTRACE
Hi Everyone,
I am doing a project using CC1310 in which CC1310 sends RF Packet which contains the data of On-duration, count, battery voltage and a device ID. The on-duration is obtained from a HWI which is called when switch is turned on, once it is off it goes back to the task. So in my code I have one Task- Sending RF Packets and an Interrupt Button callback function - to calculate on duration. I have added the codes for task and button callback function below.
Task Function
/* TX task function. Executed in Task context by TI-RTOS when the scheduler starts. */
static void txTaskFunction(UArg arg0, UArg arg1)
{
/* Enabling the battery monitoring function to check the battery voltage*/
AONBatMonEnable();
/* Setup callback for button pins */
PIN_Status status = PIN_registerIntCb(buttonPinHandle, &buttonCallbackFunction);
Assert_isTrue((status == PIN_SUCCESS), NULL);
/* Initialize the radio */
RF_Params rfParams;
RF_Params_init(&rfParams);
/* Customize the CMD_PROP_TX command for this application */
RF_cmdPropTx.pktLen = PAYLOAD_LENGTH;
RF_cmdPropTx.pPkt = packet;
RF_cmdNop.startTrigger.triggerType = TRIG_NOW;
RF_cmdNop.startTrigger.pastTrig = 1;
/* Set up the next pointers for the command chain */
RF_cmdNop.pNextOp = (rfc_radioOp_t*)&RF_cmdPropCs;
RF_cmdPropCs.pNextOp = (rfc_radioOp_t*)&RF_cmdCountBranch;
RF_cmdCountBranch.pNextOp = (rfc_radioOp_t*)&RF_cmdPropTx;
RF_cmdCountBranch.pNextOpIfOk = (rfc_radioOp_t*)&RF_cmdPropCs;
/* Customize the API commands with application specific defines */
RF_cmdPropCs.rssiThr = RSSI_THRESHOLD_DBM;
RF_cmdPropCs.csEndTime = (IDLE_TIME_US + 150) * 4; /* Add some margin */
RF_cmdCountBranch.counter = CS_RETRIES_WHEN_BUSY;
/* Request access to the radio */
rfHandle = RF_open(&rfObject, &RF_prop, (RF_RadioSetup*)&RF_cmdPropRadioDivSetup, &rfParams);
/* Set the frequency */
RF_runCmd(rfHandle, (RF_Op*)&RF_cmdFs, RF_PriorityNormal, NULL, 0);
/* Get current time */
times = RF_getCurrentTime();
RF_yield(rfHandle);
/* Enter main TX loop */
/* Getting LSB of MAC Address for Device ID */
uint64_t macAddrLsb = HWREG(FCFG1_BASE + FCFG1_O_MAC_15_4_0);
/*For Full MacAddress use following code
*
uint64_t macAddrMsb =HWREG(FCFG1_BASE + FCFG1_O_MAC_15_4_1);
uint64_t macAddress = (uint64_t)(macAddrMsb << 32) + macAddrLsb;
*/
uint8_t j = 11;
/* Reset values to avoid garbage values*/
packet[7] = 0;
packet[8] = 0;
packet[9] = 0;
packet[10] = 0;
packet[11] = 0;
/*Storing LSB of MAC Address in Radio Packet */
while(macAddrLsb>0)
{
packet[j] = macAddrLsb%100;
if(j!=0)
{macAddrLsb /= 100;}
else
{macAddrLsb /= 10;}
j--;
}
while(1)
{
/* Wait for a button press */
Semaphore_pend(txSemaphoreHandle, BIOS_WAIT_FOREVER);
/* Reading the battery voltage */
batteryStatus = AONBatMonBatteryVoltageGet();
/* Convert in Milli volts*/
batteryStatus = (batteryStatus * 125) >> 5;
batteryVoltage = (float) batteryStatus / 100;
/* Create packet with incrementing sequence number */
packet[0] = (uint8_t) (seqNumber >> 8);
packet[1] = (uint8_t) (seqNumber);
packet[2] = batteryVoltage;
//packet[3] = ;
/* Set absolute TX time to utilize automatic power management */
times += (PACKET_INTERVAL_US * 4);
RF_cmdNop.startTime = times;
/* Send packet */
RF_runCmd(rfHandle, (RF_Op*)&RF_cmdNop, RF_PriorityNormal,
&callback, 0);
RF_cmdNop.status = IDLE;
RF_cmdPropCs.status = IDLE;
RF_cmdCountBranch.status = IDLE;
RF_cmdPropTx.status = IDLE;
RF_cmdCountBranch.counter = CS_RETRIES_WHEN_BUSY;
RF_yield(rfHandle);
}
}
HWI
/***** Button Callback function *****/
static void buttonClockCb(UArg arg) {
PIN_Handle buttonHandle = (PIN_State *) arg;
/* Stop the button clock */
/* Re-enable interrupts to detect button release. */
Clock_stop(hButtonClock);
/* Check that there is active button for debounce logic*/
if (activeButtonPinId != PIN_TERMINATE)
{
/* Checking whether the button is actively pressed*/
if(!PIN_getInputValue(activeButtonPinId))
{
/* Wait here till the button is released */
while(!PIN_getInputValue(activeButtonPinId))
{
usleep(50000);
}
/* Checking whether the button is released*/
if (PIN_getInputValue(activeButtonPinId))
{
switch (activeButtonPinId)
{
case Board_DIO10:
/* Getting time form the Timestamp function*/
time1 = Timestamp_get32();
/* Calculating the time between switch pressed and released*/
timePeriod = time1-time0;
/* Converting the time to microseconds from clock ticks*/
microTime = timePeriod/0.065536;
/* Converting the time from microseconds to centiseconds */
realTime = microTime/10000;
/* Reset values to avoid garbage values*/
packet[3] = 0;
packet[4] = 0;
packet[5] = 0;
packet[6] = 0;
/* Encoding the time in different packets for radio transmission*/
i = 6;
while(realTime>0)
{
packet[i] = realTime%100;
realTime /= 100;
i--;
}
/* Posting the semaphore for the radio functions*/
Semaphore_post(txSemaphoreHandle);
break;
default:
/* Do nothing */
break;
}
}
}
}
/* Re-Enabling the interrupt for detecting the button press*/
PIN_setConfig(buttonHandle, PIN_BM_IRQ, activeButtonPinId | PIN_IRQ_NEGEDGE);
/* Set activeButtonPinId to none... */
activeButtonPinId = PIN_TERMINATE;
}
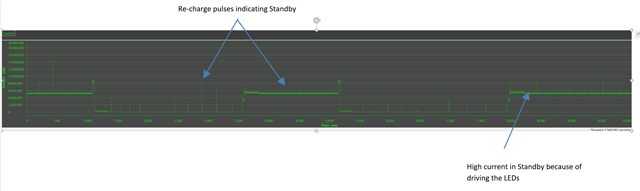
My issue is the with power consumption, I am using Lithium CR2032 3V battery and it only last 2 or 3 days, however I ran a test where it sends data every 3 seconds by running only the task and keeping the switch in off position, it lasted for more than 2 weeks. Could anyone please let me know what I am doing wrong in the code or what can be done to improve the battery life? Also the all the variables are declared static.
Thanks in advance