Other Parts Discussed in Thread: , SYSCONFIG
Hi,
I have created my own board using CC1312R7, which - among other peripherals - also contains a CP2102N-A02-GQFN28R USB transceiver. Unfortunately I have connected the UART_TX of the MCU to the UART_TX of the USB transceiver (and I did the same for the UART_RX pins).
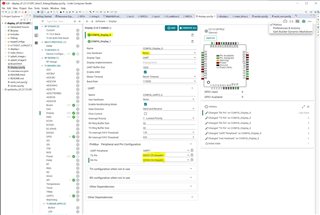
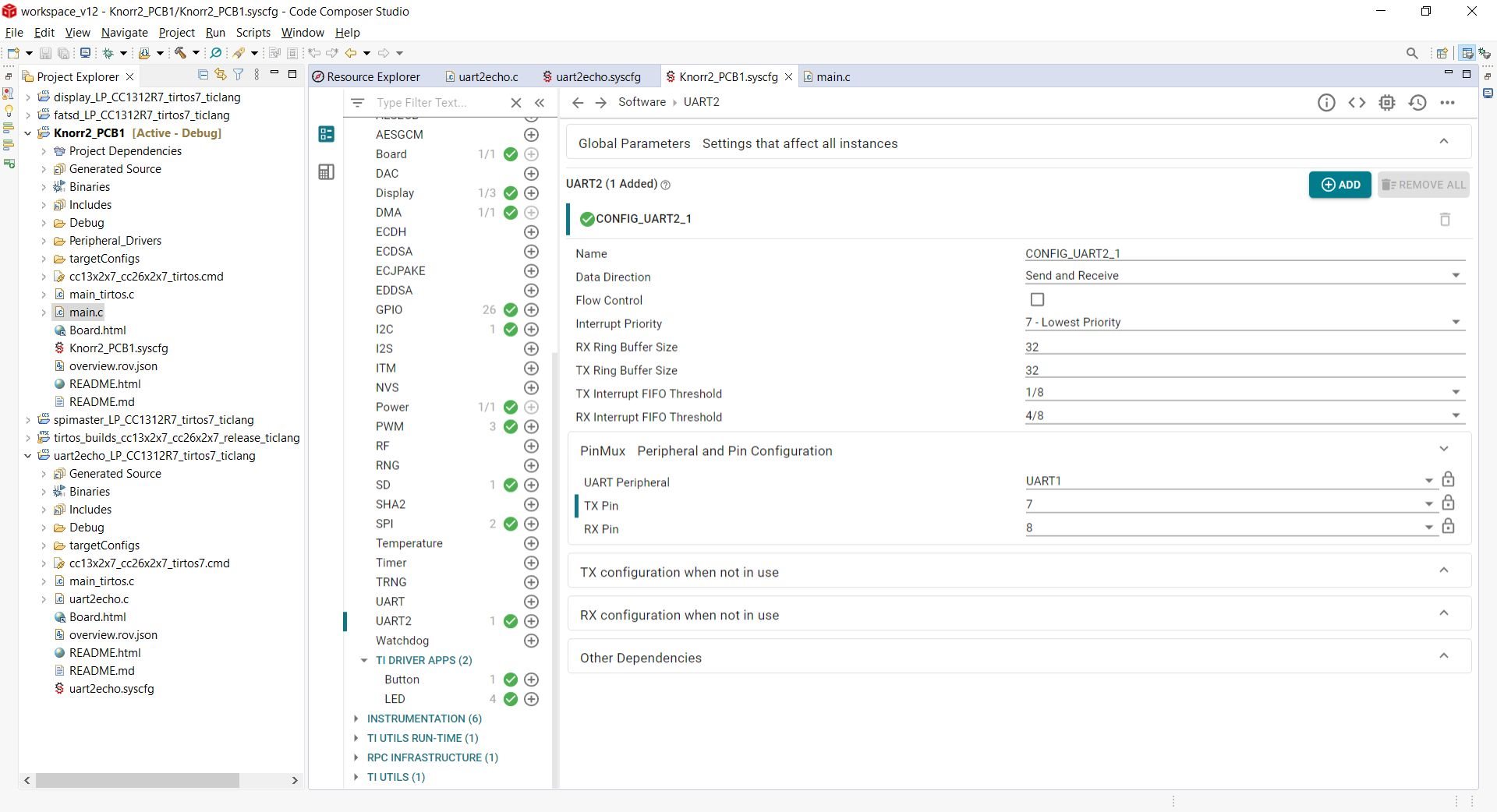
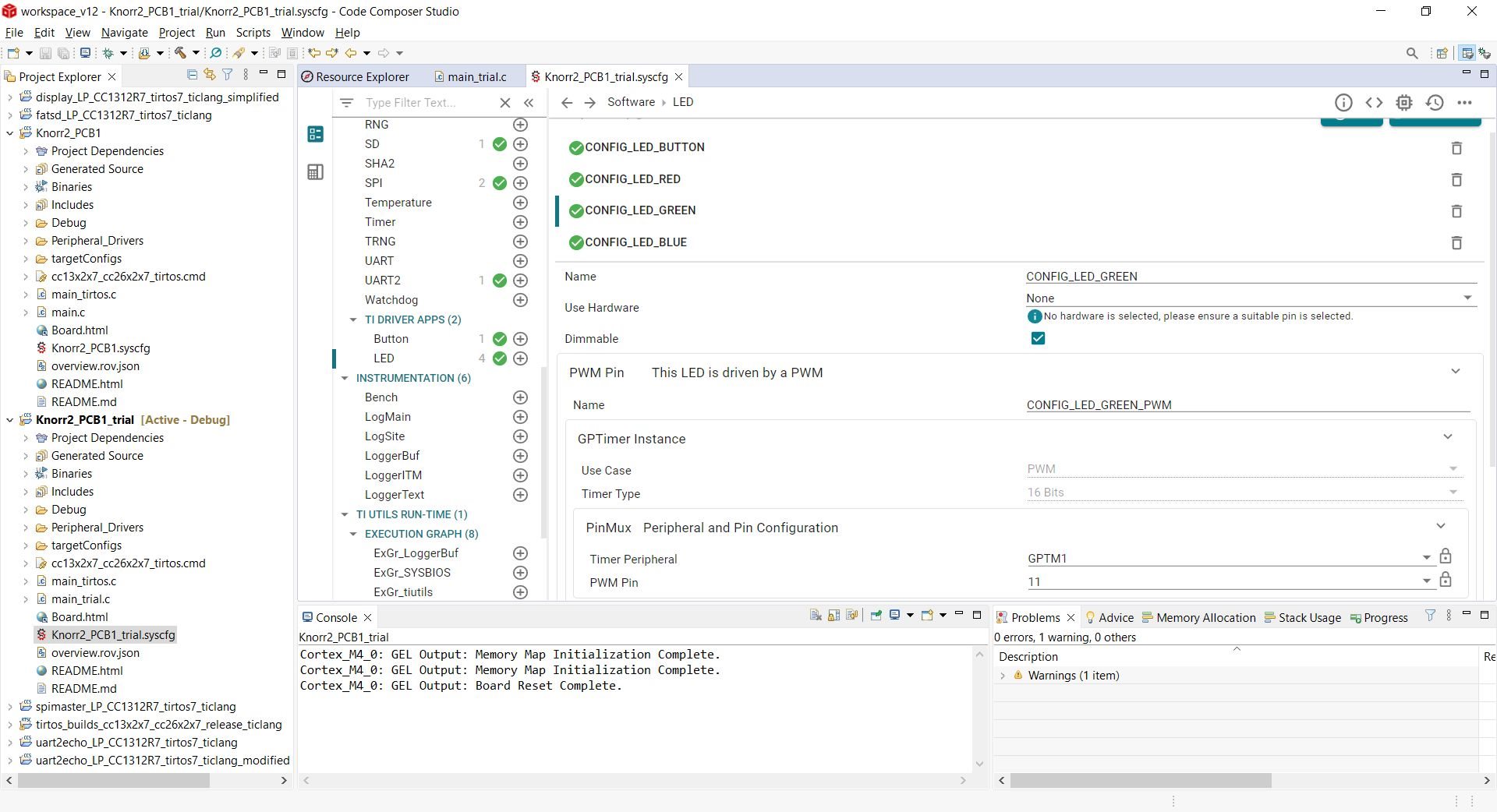
My first thought was - because I didn't want to cut and re-wire trances right away - can I remap the pins in software instead? In my project, I have used simplelink_cc13xx_cc26xx_sdk_6_30_01_03, creating the configuration with Sysconfig. I am using the UART1 peripheral for sending debug strings to the PC. I am using the XDS110 debugger from an LP-CC1312R7 to program/debug my hardware. I am also using a logic analyzer with protocol decoder to see the data traffic. In the code, I am using the Display driver (UART mode) from TI Drivers to utilize the realized "printf"-like functions. With the original Sysconfig values: Display\UART\PinMux\TX Pin = 8 and Display\UART\PinMux\RX Pin = 7 I can see the correct debug string being sent to pin 8 (DIO3) with the logic analyzer, despite of the wrong wiring in my PCB. WHen I reverse the pin mapping to: Display\UART\PinMux\TX Pin = 7 and Display\UART\PinMux\RX Pin = 8, then I can detect no bytes being sent on either of the MCU pins (I am monitoring both). I thought, that this may be due to the wrong wiring in the hardware, so I configured the RX and TX pins to currently unused pins, which are wired to only testpoints in the hardware. This configuration has worked (I can see the string with logic analyzer on pin 39): Display\UART\PinMux\TX Pin = 39 (DIO26) and Display\UART\PinMux\RX Pin = 40 (DIO27). However, when I reverse these two pins as well: Display\UART\PinMux\TX Pin = 40 (DIO27) and Display\UART\PinMux\RX Pin = 39 (DIO26), nothing can be seen on either of those pins with the logic analyzer.
I have traced back the content of the generated files under SysConfig, and they always seem to reflect the right configuration of pins, handles, etc.
Do I skip over something crucial so that some of the remap-configurations don't work? What could be the reason?
I have attached the complete project with all the files withing in both working and non-working cases. Never mind the rest of the code in main.c, it just writes and reads out some bytes to/from an onboard RTCC IC over I2C (which works by the way).
I would be grateful for some advice on what I should try to solve this problem.
I was also trying to re-map the UART pins of the CC1312R7 launchpad hardware using the SDK example project: "uart2echo_LP_CC1312R7_tirtos7_ticlang". I succeeded, but this example project does not use the TI Display middleware. Does this mean that my problem lies somewhere with the middleware too?
Thank you and Best Regards:
Balazs