Other Parts Discussed in Thread: TMP116, SYSBIOS, TMP007, CC1310
I have a problem with the RF communication using the CC1310F64 4x4mm type chip with 3v, this chip interfaced with a , the code developed and loaded on this chip works with the sensor (Presence of the SDA and SCL signal) but the emmision RF does not work, for the reception I use Smart RFstudio 7 - see attached the code n ° 1.
Before inserting the i2c parmetres and the TMP 116, the RF is working properly and sending data- see the attached code # 2.
Thank you in advance for your help.
4062.TMP116-i2c-CC1310F64-4X4mm-1.txt
/*
* Copyright (c) 2015-2016, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*/
/*
* ======== rfEasyLinkTx.c ========
*/
/* XDCtools Header files */
#include <stdlib.h>
#include <xdc/std.h>
#include <xdc/runtime/System.h>
#include <xdc/runtime/Error.h>
#include <semaphore.h>
/* BIOS Header files */
#include <ti/drivers/rf/RF.h>
#include <ti/sysbios/BIOS.h>
#include <ti/sysbios/knl/Task.h>
#include <ti/sysbios/knl/Clock.h>
#include <ti/drivers/GPIO.h>
#include <ti/drivers/I2C.h>
/* TI-RTOS Header files */
#include <ti/drivers/PIN.h>
#include <ti/drivers/Power.h>
#include <ti/devices/cc13x0/driverlib/aon_batmon.h>
#include <ti/devices/cc13x0/driverlib/aux_adc.h>
#include <ti/devices/cc13x0/driverlib/chipinfo.h>
#include <ti/devices/cc13x0/driverlib/sys_ctrl.h>
#include <semaphore.h>
#include <ti/sail/tmp116/tmp116.h>
/* Board Header files */
#include "Board.h"
/* EasyLink API Header files */
#include "easylink/EasyLink.h"
#include "sc/scif.h"
#include "version.h"
#include "../sonde_gw_fw/sys_intf.h"
#include <string.h>
#include <math.h>
#define RFEASYLINKTX_TASK_STACK_SIZE 1024
#define RFEASYLINKTX_TASK_PRIORITY 2
#define RFEASYLINKTX_BURST_SIZE 1
Task_Struct txTask; /* not static so you can see in ROV */
static Task_Params txTaskParams;
static uint8_t txTaskStack[RFEASYLINKTX_TASK_STACK_SIZE];
Task_Struct sensorTask; /* not static so you can see in ROV */
static Task_Params sensorTaskParams;
static uint8_t sensorTaskStack[RFEASYLINKTX_TASK_STACK_SIZE];
TMP116_Handle tmp116Handle ;
I2C_Handle AppI2cHandle ;
I2C_Transaction i2cTransaction;
I2C_Params AppI2cParams;
TMP116_Params tmp116Params;
sem_t tmp116Sem;
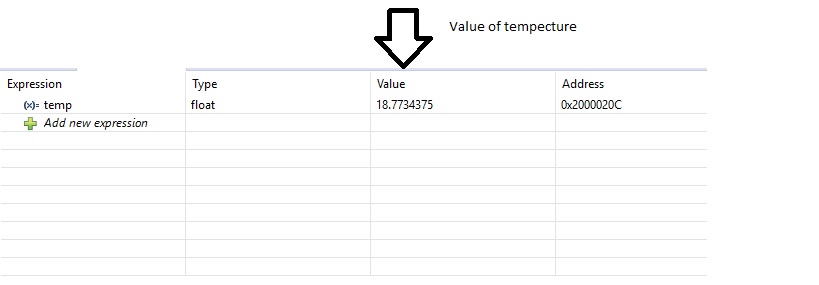
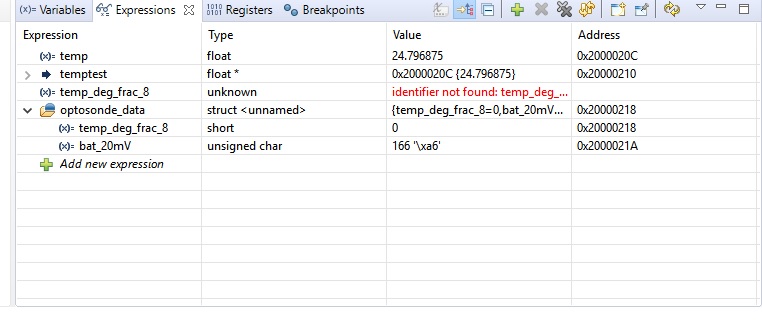
float temp;
static PIN_State pinState;
static PIN_Handle pin_handle;
typedef struct {
uint8_t reason;
int16_t temp_deg_frac_8;
uint8_t bat_20mV;
} opto_sonde_data_t;
//const int OPTOSONDE_BROKEN_TEMP_SENSOR_THRESHOLD = 1500 * 1000; // 1.5 V
//#define OPTOSONDE_DEMO_MODE 1
PIN_Config pinTable[] = {
PIN_ID(8) | PIN_INPUT_EN | PIN_PULLUP | PIN_HYSTERESIS,
PIN_TERMINATE
};
void sleepAndReset(uint32_t sleep_time_secs) {
// Enable button interrupt wake up
PIN_setInterrupt(pin_handle, PIN_ID(8) | PIN_IRQ_NEGEDGE);
uint32_t secs = sleep_time_secs;
while (secs > 0)
{
uint32_t sleep_s = secs > 2000 ? 2000 : secs;
Task_sleep((sleep_s * 1000u * 1000) / Clock_tickPeriod);
secs -= sleep_s;
}
SysCtrlSystemReset();
}
void *tmp116AlertTask(void *arg0)
{
uint16_t data;
while(1) {
/* Pend on semaphore, tmp116Sem */
if (0 == sem_wait(&tmp116Sem)) {
/* Reads status register, resetting the ALERT pin */
TMP116_readStatus(tmp116Handle, &data);
}
}
}
static void rfEasyLinkTxFnx(UArg arg0, UArg arg1)
{
opto_sonde_data_t* optosonde_data = (opto_sonde_data_t*) arg0;
// rtc_cmd_t* rtc_cmd = arg1;
// EasyLink_init(EasyLink_Phy_625bpsLrm);
// EasyLink_init(EasyLink_Phy_5kbpsSlLr);
EasyLink_init(EasyLink_Phy_Custom);
/*
* If you wish to use a frequency other than the default, use
* the following API:
* EasyLink_setFrequency(868000000);
*/
/* Set output power to 12dBm */
// EasyLink_setRfPwr(12);
EasyLink_setRfPwr(10);
EasyLink_TxPacket txPacket;
// Fill packet data
uint8_t payload_ptr = 0;
// Payload version
txPacket.payload[payload_ptr++] = (uint8_t) (0x0);
// Src MAC
EasyLink_getIeeeAddr(&txPacket.payload[payload_ptr]);
payload_ptr += 8;
// Copy data
txPacket.payload[payload_ptr++] = (uint8_t) (optosonde_data->reason);
txPacket.payload[payload_ptr++] = (uint8_t) (optosonde_data->temp_deg_frac_8 >> 8);
txPacket.payload[payload_ptr++] = (uint8_t) (optosonde_data->temp_deg_frac_8);
txPacket.payload[payload_ptr++] = (uint8_t) (optosonde_data->bat_20mV);
// Firmware version
memcpy(&txPacket.payload[payload_ptr], &VERSION_HASH, sizeof(VERSION_HASH));
payload_ptr += sizeof(VERSION_HASH);
txPacket.len = payload_ptr;
txPacket.absTime = 0;
txPacket.dstAddr[0] = OPTOSONDE_ADDR;
EasyLink_Status result = EasyLink_transmit(&txPacket);
if (result == EasyLink_Status_Success)
{
/* Toggle LED1 to indicate TX */
// PIN_setOutputValue(pinHandle, Board_PIN_LED1,!PIN_getOutputValue(Board_PIN_LED1));
}
else
{
/* Toggle LED1 and LED2 to indicate error */
// PIN_setOutputValue(pinHandle, Board_PIN_LED1,!PIN_getOutputValue(Board_PIN_LED1));
// PIN_setOutputValue(pinHandle, Board_PIN_LED2,!PIN_getOutputValue(Board_PIN_LED2));
}
// Prevent button reset overload
if (optosonde_data->reason == optosonde_reason_button) {
Task_sleep(1000000 / Clock_tickPeriod);
}
// Tell RTC to sleep
#ifdef OPTOSONDE_DEMO_MODE
uint32_t sleep_time_s = 30;
#elif OPTOSONDE_VITICODE
uint32_t sleep_time_s = 10 * 60;
#else
uint32_t sleep_time_s = 1 * 3600;
#endif
sleepAndReset(sleep_time_s);
}
void sendorTask_AlertCB()
{
static opto_sonde_data_t optosonde_data;
I2C_init();
TMP116_init();
/* Clear the ALERT interrupt source */
scifClearAlertIntSource();
/* Only handle the periodic event alert */
if (scifGetAlertEvents() & (1 << SCIF_ADCMEAS_TASK_ID))
{
optosonde_data.reason = optosonde_reason_periodic;
/* Get the SCE "output" structure */
SCIF_ADCMEAS_OUTPUT_T* pOutput = scifGetTaskStruct(SCIF_ADCMEAS_TASK_ID, SCIF_STRUCT_OUTPUT);
//GPIO_init();
// GPIO_write(Board_TMP116_PWR, Board_TMP116_ON);
I2C_Params_init(&AppI2cParams);
AppI2cParams.transferMode = I2C_MODE_BLOCKING;
AppI2cParams.transferCallbackFxn = NULL;
AppI2cParams.bitRate = I2C_400kHz;
AppI2cHandle = I2C_open(CC1310_LAUNCHXL_I2C0, NULL);
if(AppI2cHandle == NULL){
/* Error opening I2C */
while (1);
}
TMP116_Params_init(&tmp116Params);
/* Callback for ALERT event */
tmp116Handle = TMP116_open(Board_TMP007_ROOMTEMP, AppI2cHandle, &tmp116Params);
if (tmp116Handle == NULL) {
while(1);
}
/* Allow the sensor hardware to complete its first conversion */
TMP116_setTempLimit(tmp116Handle, TMP116_CELSIUS,(float)30.0F, (float)20.0F) ;
/*int32_t adcVal_uV[5];
int i;
for (i = 0; i < 4; i++) {
adcVal_uV[i] = AUXADCValueToMicrovolts(AUXADC_FIXED_REF_VOLTAGE_NORMAL, AUXADCAdjustValueForGainAndOffset(pOutput->ntcraw[i], AUXADCGetAdjustmentGain(AUXADC_REF_FIXED), AUXADCGetAdjustmentOffset(AUXADC_REF_FIXED)));
}
adcVal_uV[4] = 0;
int validMeasIdx;
for (validMeasIdx = 0; validMeasIdx < 4; validMeasIdx++) {
if (adcVal_uV[validMeasIdx] > OPTOSONDE_BROKEN_TEMP_SENSOR_THRESHOLD) {
if (validMeasIdx == 3) {
// Sensor is dead
optosonde_data.reason = optosonde_reason_sensorfail;
}
} else {
break;
}
}
const int32_t ptcR = adcVal_uV[validMeasIdx] / pOutput->ntcIuA[validMeasIdx];
//const double ptcB25_100 = 3950;
//const double rinf = 0.1763226979; // rinf = R0 * exp(-B/T0)
//T = B / ln (R / rinf)
//double ptcTemp = ptcB25_100 / log(ptcR / rinf) - 273.15;*/
TMP116_getTemp(tmp116Handle, TMP116_CELSIUS, &temp);
optosonde_data.temp_deg_frac_8 =(int16_t) temp*256 ;
while (!AONBatMonNewBatteryMeasureReady())
{
// Wait
Task_sleep(100 * 100 / Clock_tickPeriod);
}
optosonde_data.bat_20mV = (AONBatMonBatteryVoltageGet() * 390625) / 2000000;
AONBatMonDisable();
if (PIN_getInputValue(IOID_8) == 0) {
optosonde_data.reason = optosonde_reason_button;
}
// Init Tx task
Task_Params_init(&txTaskParams);
txTaskParams.stackSize = RFEASYLINKTX_TASK_STACK_SIZE;
txTaskParams.priority = RFEASYLINKTX_TASK_PRIORITY + 1;
txTaskParams.stack = &txTaskStack;
txTaskParams.arg0 = (xdc_UArg) &optosonde_data;
Task_construct(&txTask, rfEasyLinkTxFnx, &txTaskParams, NULL);
}
else
{
// Sensor failed
sleepAndReset(10 * 60);
}
/* Acknowledge the alert event */
scifAckAlertEvents();
scifUninit();
}
void sensorTask_fn(UArg arg0, UArg arg1)
{
AONBatMonEnable();
scifOsalInit();
scifOsalRegisterTaskAlertCallback(sendorTask_AlertCB);
scifInit(&scifDriverSetup);
scifExecuteTasksOnceNbl(1 << SCIF_ADCMEAS_TASK_ID);
}
void pinInt(PIN_Handle handle, PIN_Id pinId) {
if (pinId == 8) {
// Force reset to trigger measure and TX
SysCtrlSystemReset();
}
}
/*
* ======== main ========
*/
int opto_main(void)
{
/* Call driver init functions. */
Board_initGeneral();
pin_handle = PIN_open(&pinState, pinTable);
PIN_registerIntCb(pin_handle, pinInt);
// Sensor task
Task_Params_init(&sensorTaskParams);
txTaskParams.stackSize = RFEASYLINKTX_TASK_STACK_SIZE;
txTaskParams.priority = RFEASYLINKTX_TASK_PRIORITY;
txTaskParams.stack = &sensorTaskStack;
txTaskParams.arg0 = 0;
txTaskParams.arg1 = 0;
Task_construct(&sensorTask, sensorTask_fn, &sensorTaskParams, NULL);
/* Start BIOS */
BIOS_start();
return (0);
}
7776.TMP116-I2C-CC1310F64-4x4mm-2.txt
/*
* Copyright (c) 2015-2016, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*/
/*
* ======== rfEasyLinkTx.c ========
*/
/* XDCtools Header files */
#include <stdlib.h>
#include <xdc/std.h>
#include <xdc/runtime/System.h>
#include <xdc/runtime/Error.h>
#include <semaphore.h>
/* BIOS Header files */
#include <ti/drivers/rf/RF.h>
#include <ti/sysbios/BIOS.h>
#include <ti/sysbios/knl/Task.h>
#include <ti/sysbios/knl/Clock.h>
#include <ti/drivers/GPIO.h>
#include <ti/drivers/I2C.h>
/* TI-RTOS Header files */
#include <ti/drivers/PIN.h>
#include <ti/drivers/Power.h>
#include <ti/devices/cc13x0/driverlib/aon_batmon.h>
#include <ti/devices/cc13x0/driverlib/aux_adc.h>
#include <ti/devices/cc13x0/driverlib/chipinfo.h>
#include <ti/devices/cc13x0/driverlib/sys_ctrl.h>
#include <semaphore.h>
#include <ti/sail/tmp116/tmp116.h>
/* Board Header files */
#include "Board.h"
/* EasyLink API Header files */
#include "easylink/EasyLink.h"
#include "sc/scif.h"
#include "version.h"
#include "../sonde_gw_fw/sys_intf.h"
#include <string.h>
#include <math.h>
#define RFEASYLINKTX_TASK_STACK_SIZE 1024
#define RFEASYLINKTX_TASK_PRIORITY 2
#define RFEASYLINKTX_BURST_SIZE 1
Task_Struct txTask; /* not static so you can see in ROV */
static Task_Params txTaskParams;
static uint8_t txTaskStack[RFEASYLINKTX_TASK_STACK_SIZE];
Task_Struct sensorTask; /* not static so you can see in ROV */
static Task_Params sensorTaskParams;
static uint8_t sensorTaskStack[RFEASYLINKTX_TASK_STACK_SIZE];
TMP116_Handle tmp116Handle ;
I2C_Handle AppI2cHandle ;
I2C_Transaction i2cTransaction;
I2C_Params AppI2cParams;
TMP116_Params tmp116Params;
sem_t tmp116Sem;
float temp;
static PIN_State pinState;
static PIN_Handle pin_handle;
typedef struct {
uint8_t reason;
int16_t temp_deg_frac_8;
uint8_t bat_20mV;
} opto_sonde_data_t;
//const int OPTOSONDE_BROKEN_TEMP_SENSOR_THRESHOLD = 1500 * 1000; // 1.5 V
//#define OPTOSONDE_DEMO_MODE 1
PIN_Config pinTable[] = {
PIN_ID(8) | PIN_INPUT_EN | PIN_PULLUP | PIN_HYSTERESIS,
PIN_TERMINATE
};
void sleepAndReset(uint32_t sleep_time_secs) {
// Enable button interrupt wake up
PIN_setInterrupt(pin_handle, PIN_ID(8) | PIN_IRQ_NEGEDGE);
uint32_t secs = sleep_time_secs;
while (secs > 0)
{
uint32_t sleep_s = secs > 2000 ? 2000 : secs;
Task_sleep((sleep_s * 1000u * 1000) / Clock_tickPeriod);
secs -= sleep_s;
}
SysCtrlSystemReset();
}
void *tmp116AlertTask(void *arg0)
{
uint16_t data;
while(1) {
/* Pend on semaphore, tmp116Sem */
if (0 == sem_wait(&tmp116Sem)) {
/* Reads status register, resetting the ALERT pin */
TMP116_readStatus(tmp116Handle, &data);
}
}
}
static void rfEasyLinkTxFnx(UArg arg0, UArg arg1)
{
opto_sonde_data_t* optosonde_data = (opto_sonde_data_t*) arg0;
// rtc_cmd_t* rtc_cmd = arg1;
// EasyLink_init(EasyLink_Phy_625bpsLrm);
// EasyLink_init(EasyLink_Phy_5kbpsSlLr);
EasyLink_init(EasyLink_Phy_Custom);
/*
* If you wish to use a frequency other than the default, use
* the following API:
* EasyLink_setFrequency(868000000);
*/
/* Set output power to 12dBm */
// EasyLink_setRfPwr(12);
EasyLink_setRfPwr(10);
EasyLink_TxPacket txPacket;
// Fill packet data
uint8_t payload_ptr = 0;
// Payload version
txPacket.payload[payload_ptr++] = (uint8_t) (0x0);
// Src MAC
EasyLink_getIeeeAddr(&txPacket.payload[payload_ptr]);
payload_ptr += 8;
// Copy data
txPacket.payload[payload_ptr++] = (uint8_t) (optosonde_data->reason);
txPacket.payload[payload_ptr++] = (uint8_t) (optosonde_data->temp_deg_frac_8 >> 8);
txPacket.payload[payload_ptr++] = (uint8_t) (optosonde_data->temp_deg_frac_8);
txPacket.payload[payload_ptr++] = (uint8_t) (optosonde_data->bat_20mV);
// Firmware version
memcpy(&txPacket.payload[payload_ptr], &VERSION_HASH, sizeof(VERSION_HASH));
payload_ptr += sizeof(VERSION_HASH);
txPacket.len = payload_ptr;
txPacket.absTime = 0;
txPacket.dstAddr[0] = OPTOSONDE_ADDR;
EasyLink_Status result = EasyLink_transmit(&txPacket);
if (result == EasyLink_Status_Success)
{
/* Toggle LED1 to indicate TX */
// PIN_setOutputValue(pinHandle, Board_PIN_LED1,!PIN_getOutputValue(Board_PIN_LED1));
}
else
{
/* Toggle LED1 and LED2 to indicate error */
// PIN_setOutputValue(pinHandle, Board_PIN_LED1,!PIN_getOutputValue(Board_PIN_LED1));
// PIN_setOutputValue(pinHandle, Board_PIN_LED2,!PIN_getOutputValue(Board_PIN_LED2));
}
// Prevent button reset overload
if (optosonde_data->reason == optosonde_reason_button) {
Task_sleep(1000000 / Clock_tickPeriod);
}
// Tell RTC to sleep
#ifdef OPTOSONDE_DEMO_MODE
uint32_t sleep_time_s = 30;
#elif OPTOSONDE_VITICODE
uint32_t sleep_time_s = 10 * 60;
#else
uint32_t sleep_time_s = 1 * 3600;
#endif
sleepAndReset(sleep_time_s);
}
void sendorTask_AlertCB()
{
static opto_sonde_data_t optosonde_data;
//I2C_init();
//TMP116_init();
/* Clear the ALERT interrupt source */
scifClearAlertIntSource();
/* Only handle the periodic event alert */
if (scifGetAlertEvents() & (1 << SCIF_ADCMEAS_TASK_ID))
{
optosonde_data.reason = optosonde_reason_periodic;
/* Get the SCE "output" structure */
SCIF_ADCMEAS_OUTPUT_T* pOutput = scifGetTaskStruct(SCIF_ADCMEAS_TASK_ID, SCIF_STRUCT_OUTPUT);
//GPIO_init();
// GPIO_write(Board_TMP116_PWR, Board_TMP116_ON);
//I2C_Params_init(&AppI2cParams);
//AppI2cParams.transferMode = I2C_MODE_BLOCKING;
//AppI2cParams.transferCallbackFxn = NULL;
//AppI2cParams.bitRate = I2C_400kHz;
//AppI2cHandle = I2C_open(CC1310_LAUNCHXL_I2C0, NULL);
//if(AppI2cHandle == NULL){
/* Error opening I2C */
//while (1);
//}
//TMP116_Params_init(&tmp116Params);
/* Callback for ALERT event */
//tmp116Handle = TMP116_open(Board_TMP007_ROOMTEMP, AppI2cHandle, &tmp116Params);
//if (tmp116Handle == NULL) {
//while(1);
//}
/* Allow the sensor hardware to complete its first conversion */
//TMP116_setTempLimit(tmp116Handle, TMP116_CELSIUS,(float)30.0F, (float)20.0F) ;
/*int32_t adcVal_uV[5];
int i;
for (i = 0; i < 4; i++) {
adcVal_uV[i] = AUXADCValueToMicrovolts(AUXADC_FIXED_REF_VOLTAGE_NORMAL, AUXADCAdjustValueForGainAndOffset(pOutput->ntcraw[i], AUXADCGetAdjustmentGain(AUXADC_REF_FIXED), AUXADCGetAdjustmentOffset(AUXADC_REF_FIXED)));
}
adcVal_uV[4] = 0;
int validMeasIdx;
for (validMeasIdx = 0; validMeasIdx < 4; validMeasIdx++) {
if (adcVal_uV[validMeasIdx] > OPTOSONDE_BROKEN_TEMP_SENSOR_THRESHOLD) {
if (validMeasIdx == 3) {
// Sensor is dead
optosonde_data.reason = optosonde_reason_sensorfail;
}
} else {
break;
}
}
const int32_t ptcR = adcVal_uV[validMeasIdx] / pOutput->ntcIuA[validMeasIdx];
//const double ptcB25_100 = 3950;
//const double rinf = 0.1763226979; // rinf = R0 * exp(-B/T0)
//T = B / ln (R / rinf)
//double ptcTemp = ptcB25_100 / log(ptcR / rinf) - 273.15;*/
//TMP116_getTemp(tmp116Handle, TMP116_CELSIUS, &temp);
optosonde_data.temp_deg_frac_8 =(int16_t) temp*256 ;
while (!AONBatMonNewBatteryMeasureReady())
{
// Wait
Task_sleep(100 * 100 / Clock_tickPeriod);
}
optosonde_data.bat_20mV = (AONBatMonBatteryVoltageGet() * 390625) / 2000000;
AONBatMonDisable();
if (PIN_getInputValue(IOID_8) == 0) {
optosonde_data.reason = optosonde_reason_button;
}
// Init Tx task
Task_Params_init(&txTaskParams);
txTaskParams.stackSize = RFEASYLINKTX_TASK_STACK_SIZE;
txTaskParams.priority = RFEASYLINKTX_TASK_PRIORITY + 1;
txTaskParams.stack = &txTaskStack;
txTaskParams.arg0 = (xdc_UArg) &optosonde_data;
Task_construct(&txTask, rfEasyLinkTxFnx, &txTaskParams, NULL);
}
else
{
// Sensor failed
sleepAndReset(10 * 60);
}
/* Acknowledge the alert event */
scifAckAlertEvents();
scifUninit();
}
void sensorTask_fn(UArg arg0, UArg arg1)
{
AONBatMonEnable();
scifOsalInit();
scifOsalRegisterTaskAlertCallback(sendorTask_AlertCB);
scifInit(&scifDriverSetup);
scifExecuteTasksOnceNbl(1 << SCIF_ADCMEAS_TASK_ID);
}
void pinInt(PIN_Handle handle, PIN_Id pinId) {
if (pinId == 8) {
// Force reset to trigger measure and TX
SysCtrlSystemReset();
}
}
/*
* ======== main ========
*/
int opto_main(void)
{
/* Call driver init functions. */
Board_initGeneral();
pin_handle = PIN_open(&pinState, pinTable);
PIN_registerIntCb(pin_handle, pinInt);
// Sensor task
Task_Params_init(&sensorTaskParams);
txTaskParams.stackSize = RFEASYLINKTX_TASK_STACK_SIZE;
txTaskParams.priority = RFEASYLINKTX_TASK_PRIORITY;
txTaskParams.stack = &sensorTaskStack;
txTaskParams.arg0 = 0;
txTaskParams.arg1 = 0;
Task_construct(&sensorTask, sensorTask_fn, &sensorTaskParams, NULL);
/* Start BIOS */
BIOS_start();
return (0);
}