Other Parts Discussed in Thread: TMS320F28379D, CC1310, CC1350
Hi team
Good day!
customer request:
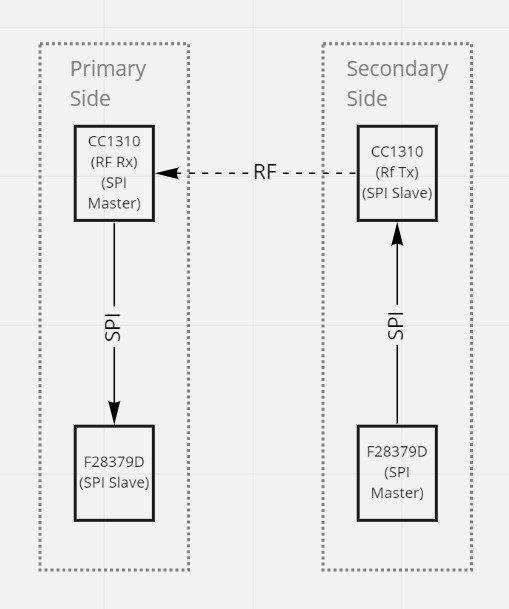
I'm trying to get a TMS320F28379D board to communicate over SPI to a CC1310 launchpad, I then want the CC1310 to broadcast the values that are received over RF, at the moment I can get the CC1310 to receive and interpret the F28379D's values over SPI, but the example code I am using is struggling to receive these values over SPI and transmit over RF.
Regards
Aosker