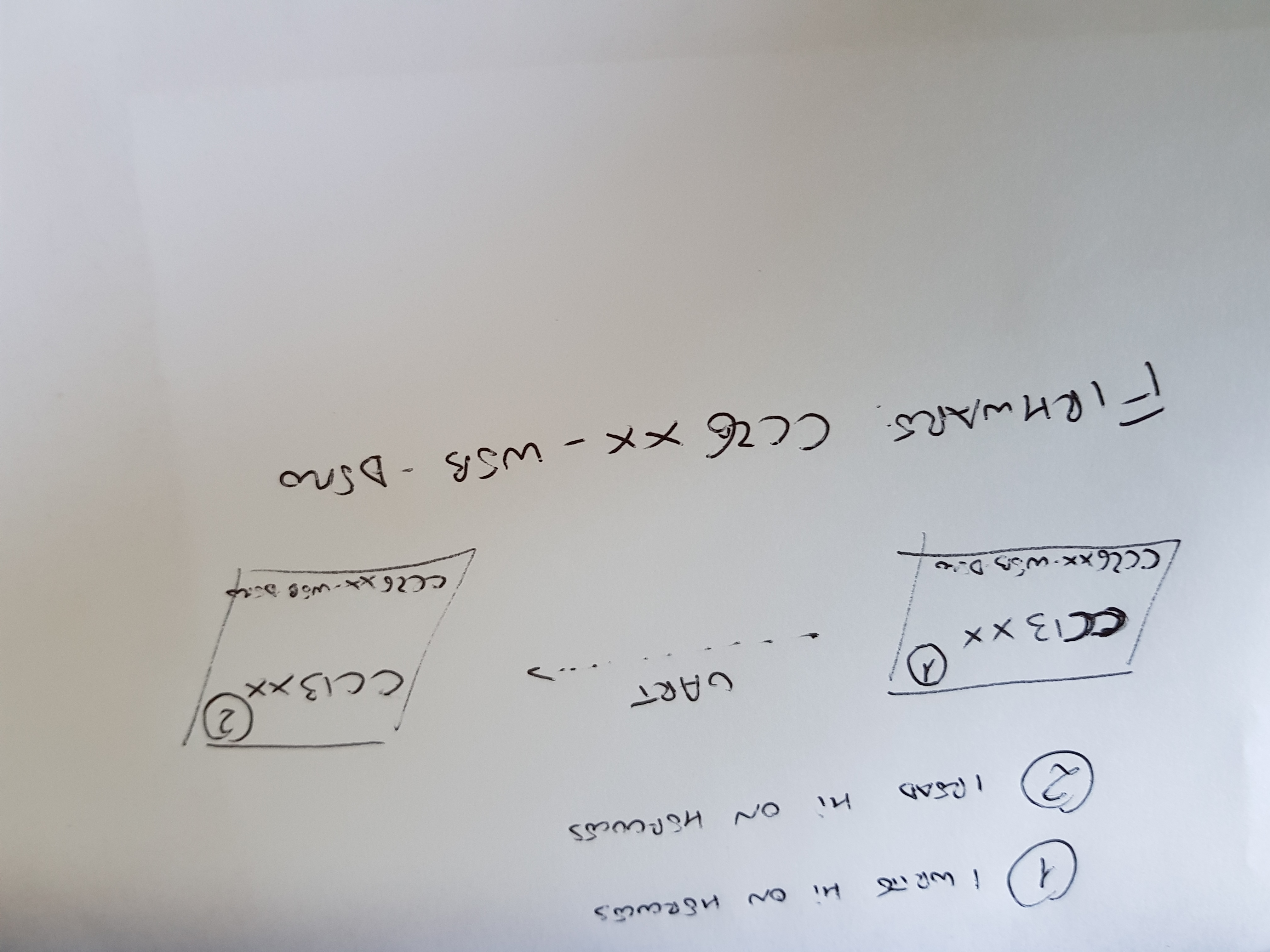
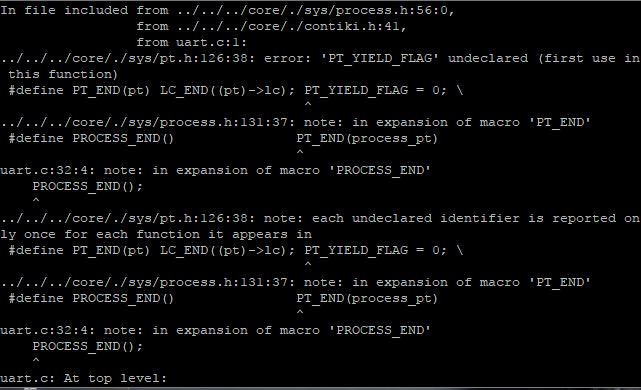
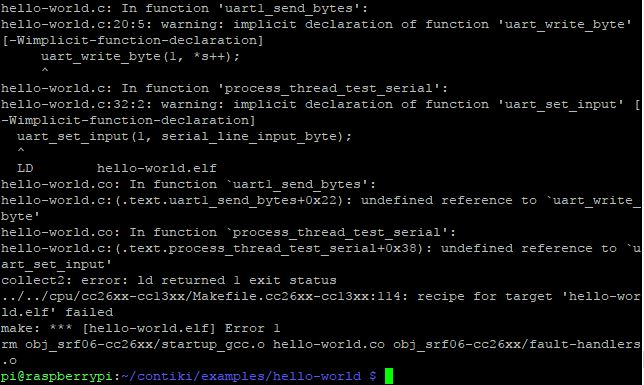
Hi everyone, I working with two cc13xx device and I would like to implement a serial communication between device. I think that used a HyperTerminal, but I read on UART and not communicate.

-
Ask a related question
What is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.