


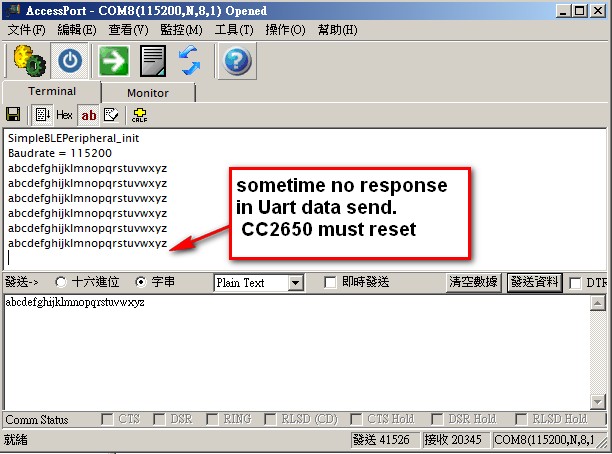
CC2650 Uart receive Data and UART write (Echo test ) , sometime Chip have holding on.
BLE can not connect and Find it on Holding time.
Do you have any suggestion?
code reference=>
Receive with Return Partial
This use case will read in UART_MODE_BLOCKING until the wanted amount of bytes is received or until a started reception is inactive for a 32-bit period. This UART_read() call can also be used when unknown amount of bytes shall be read. Note: The partial return is also possible in UART_MODE_CALLBACK mode.
* UART_Handle handle;
* UART_Params params;
* uint8_t rxBuf[100]; // Receive buffer
*
* // Init UART and specify non-default parameters
* UART_Params_init(¶ms);
* params.baudRate = 9600;
* params.writeDataMode = UART_DATA_BINARY;
*
* // Open the UART and initiate the partial read
* handle = UART_open(Board_UART, ¶ms);
* // Enable RETURN_PARTIAL
* UART_control(handle, UARTCC26XX_RETURN_PARTIAL_ENABLE, NULL);
* // Begin read
* int rxBytes = UART_read(handle, rxBuf, 100));
* // Callback function
* static void readCallback(UART_Handle handle, void *rxBuf, size_t size)
* {
* // Copy bytes from RX buffer to TX buffer
* for(size_t i = 0; i < size; i++)
* txBuf[i] = ((uint8_t*)rxBuf)[i];
*
* // Echo the bytes received back to transmitter
* UART_write(handle, txBuf, size);
*
* // Start another read, with size the same as it was during first call to
* // UART_read()
* UART_read(handle, rxBuf, wantedRxBytes);
* }
