Other Parts Discussed in Thread: CC2650, ADS1291
Hi there,
i am using the CC2650 Launchpad with the Sensortag Project.
I made my custom device file and i can program my device with SPI and get the values from it.
After a few seconds the MCU crashes and stops.
The reason is because of the spi read function. My data is ready at a 500Hz frequency and i get an interrupt to get the value.
Once the interrupt is in action, it calls my int function and i send the spi read command to get the value:
Set_ADS1291_Chip_Enable();
success= bspSpiRead(SPI_Tx_buf, 4);
Clear_ADS1291_Chip_Enable();
I have commented the "success= bspSpiRead(SPI_Tx_buf, 4);" out and the project didnt crash anymore.
So is there anything wrong with my SPI? Is there anything on sensortag project that is incompatible with it?
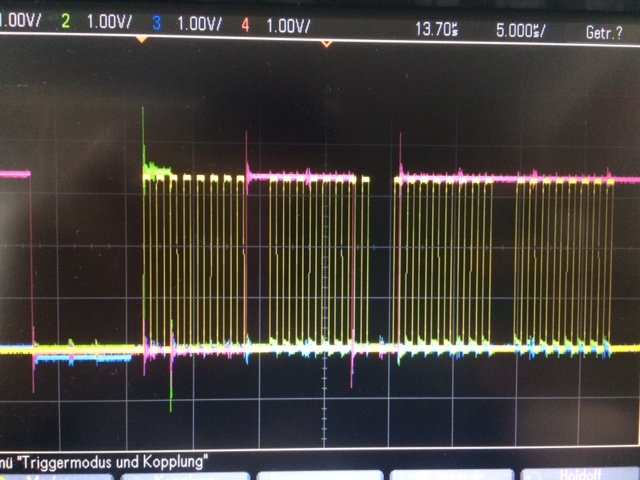
On the oscilloscope i can see that the 4 SPI clock blocks are sent out and the ADS1291 device is sending the value.
The only thing strange is that returned "success" value is "failed", why is it failing? Is this the reason why is crashing?
The MCU is only advertising and not connected to any device at this point.
Any idea?