


Part Number: CC2640R2F
Tool/software: TI-RTOS
Hi TI,
I am working with the CC2640R2FRGZR 7x7, I need to send an UART message on an external slave controller and receive an answer from the slave MCU if it is active.
I have the following requirements:
- The read size may vary from 4 to 255 byte and I do not know the size when I call the UART_read() so I need to call it every time with the possible maximum size like this:
UART_read(uartHandle, rxBuf_raw, Maximum_msg_size);
- It may also happen that the slave controller is in sleep mode when I send the message so it will not answer. In this case I need to stop reading on a timeout.
- We use asynchronous UART communication without handshaking or flow control.
- The whole UART communication part is linked as a library in a simple peripheral project, so I need to use UART_MODE_CALLBACK in order not to block the main application.
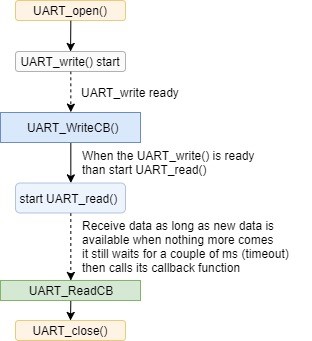
I have represented in the figure below what I would like to have.
The problem is:
“An unfinished asynchronous read operation must always be cancelled using UART_readCancel() before calling UART_close()“.
But I don’t know when I need to call the UART_readCancel() as I don’t know the size of the message that I need to receive.

My UART settings:
UART_init();
/* Create a UART with data processing off. */
UART_Params_init(&uartParams);
uartParams.writeDataMode = UART_DATA_BINARY;
uartParams.readDataMode = UART_DATA_BINARY;
uartParams.readReturnMode = UART_RETURN_FULL;
uartParams.dataLength = UART_LEN_8;
uartParams.stopBits = UART_STOP_ONE;
uartParams.parityType = UART_PAR_NONE;
uartParams.baudRate = Baud_rate;
/* Configure write callback */
uartParams.writeMode = UART_MODE_CALLBACK;
uartParams.writeCallback = UART_WriteCB;
/* Configure read callback */
uartParams.readMode = UART_MODE_CALLBACK;
uartParams.readCallback = UART_ReadCB;
These are the suggestions from TI:
“Regarding the UART case it appears that the customer would greatly benefit from enforcing a frame format like this: | Start byte | LEN | PAYLOAD |
Without a known frame format they would either need to implement an application level solution where they run a clock between the uartRxCBs and call readCancel() if they have received nothing in > 3ms. If they implement a frame format they can do something like Read 2 bytes (START, LEN) and based on LEN read the rest of payload.”
We do use such a frame format so the idea of reading the start byte and the LEN is possible but it raises the following questions:
- I still need a clock for the case when no data is received, to call UART_readCancel() because: "Timeouts are not supported in CALLBACK mode" so I need to make my own timeout somehow. Do I understand it correctly?
- When the UART_read( first 2 bytes START & LEN ) is ready and I call a new UART_read( Remaining bytes based on the LEN ) how can I assure that no data will be lost between the two UART_read() calls. Does the UART module continue to receive in its buffer and UART_read() is only to read out this buffer, or when the new UART_read() is not called early enough (in the Inter Byte Time) the receive is stopped and these bytes could be lost. See the Non ideal case in the figure below.

- I do not really understand the use and purpose from UART_readPolling() could it be helpful in my case?
Thank you in advance,
Örs


