Part Number: AM2432
Tool/software:
Hi TI Experts,
Customer is working on SDK9.2.
They recently meet a strange problem when Ethercat upgrade in flash.
If the UART DMA is enabled (non-cacheable) when Ethercat upgrade, write value 1 to the flash address 0x7e000, the read out value at the same flash address is 0 not expected 1. The same situations happens for writing many other address in the flash also.

If the UART DMA is disabled when Ethercat upgrade, write value 1 to the flash address 0x7f000, the read out value at the same flash address is 1 as expected. And it is working in all other address writing.

This really confuse customer how the UART DMA could somehow affect the ethercat flashing values.
The UART Transfer coding is below.
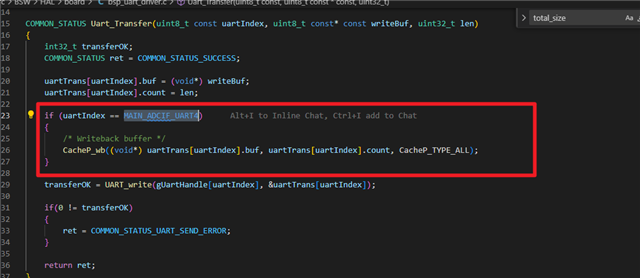
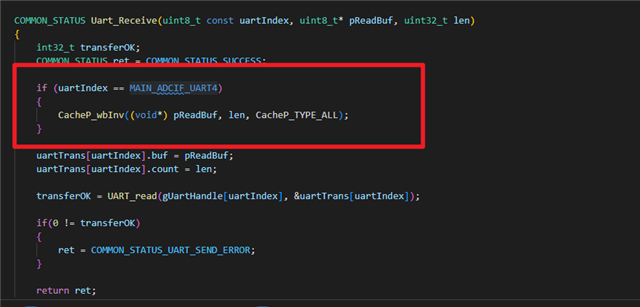
The UART Receiver coding is below.
Could you help provide some suggestions please?
Thanks,
Kevin