Dear support,
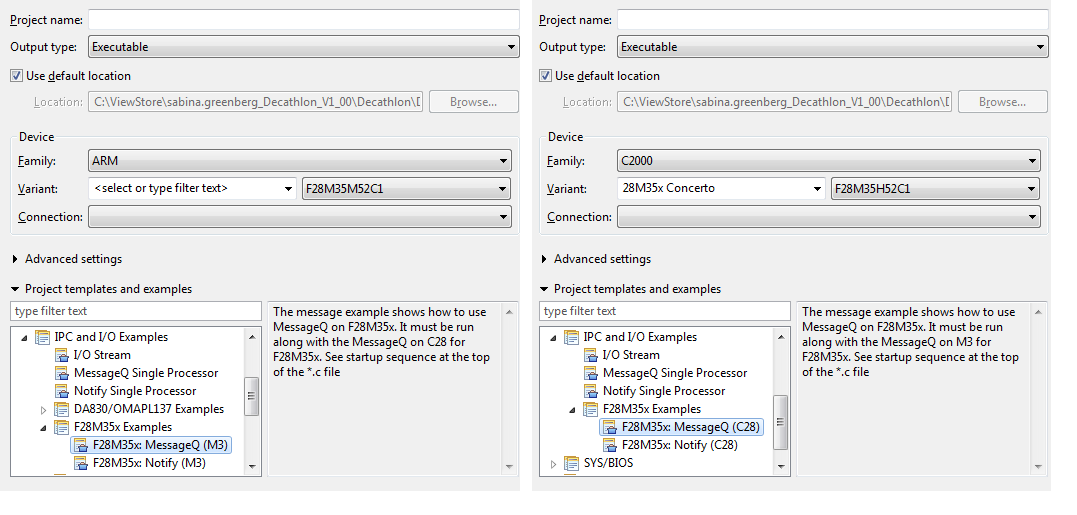
We work with concerto F28M35H52C1, MCU SDK 1.0.0.68, XDCTools 3.24.60.
Our configuration include shared memory using. Program work fine from CCS,
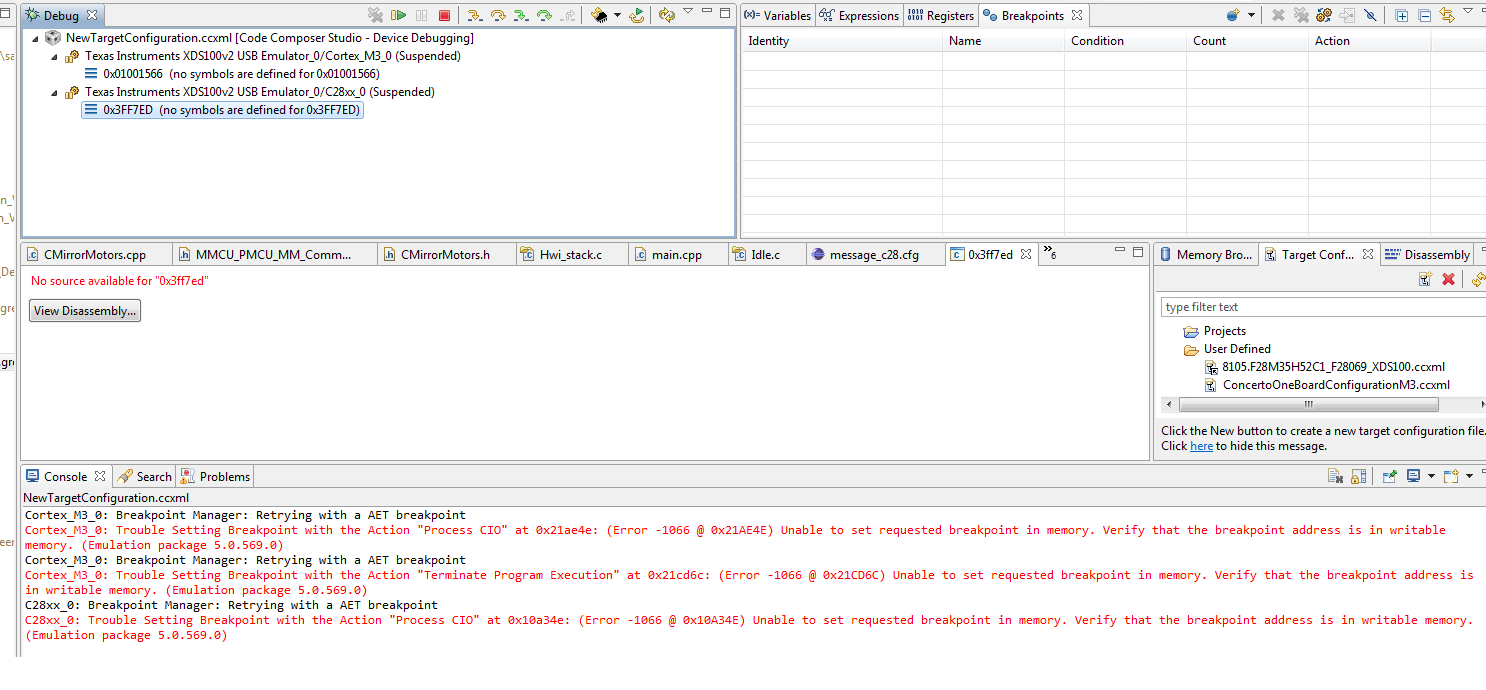
We have problem with shared memory after starting program from the flash without CCS using.
IPC doesn't work in this case - it seems that
MessageQ_get(messageQ, &msg, MessageQ_FOREVER); and MessageQ_get(messageQ_2, &msg, MessageQ_FOREVER);
don't returned with new message at all.
Without shared memory using we don't have this problem at all.
Per Judan recomendation (http://e2e.ti.com/support/embedded/bios/f/355/p/239671/854486.aspx#854486) we added M3_Ram_Init() in the main() before BIOS_start(), but it didn't help.
Could you help us to resolve the problem.
Attached is our jel files, cfg and map.7776.boot from mem.rar
Thanks, Sabina