Part Number: AM3359
Hey
At the moment I am trying to create a project for a stream socket communication. Therefor I used the NimuBasicExample (from PDK 1.0.6) as template.
I added some code for the socket comm. referring to the NDK Users/Reference Guide.
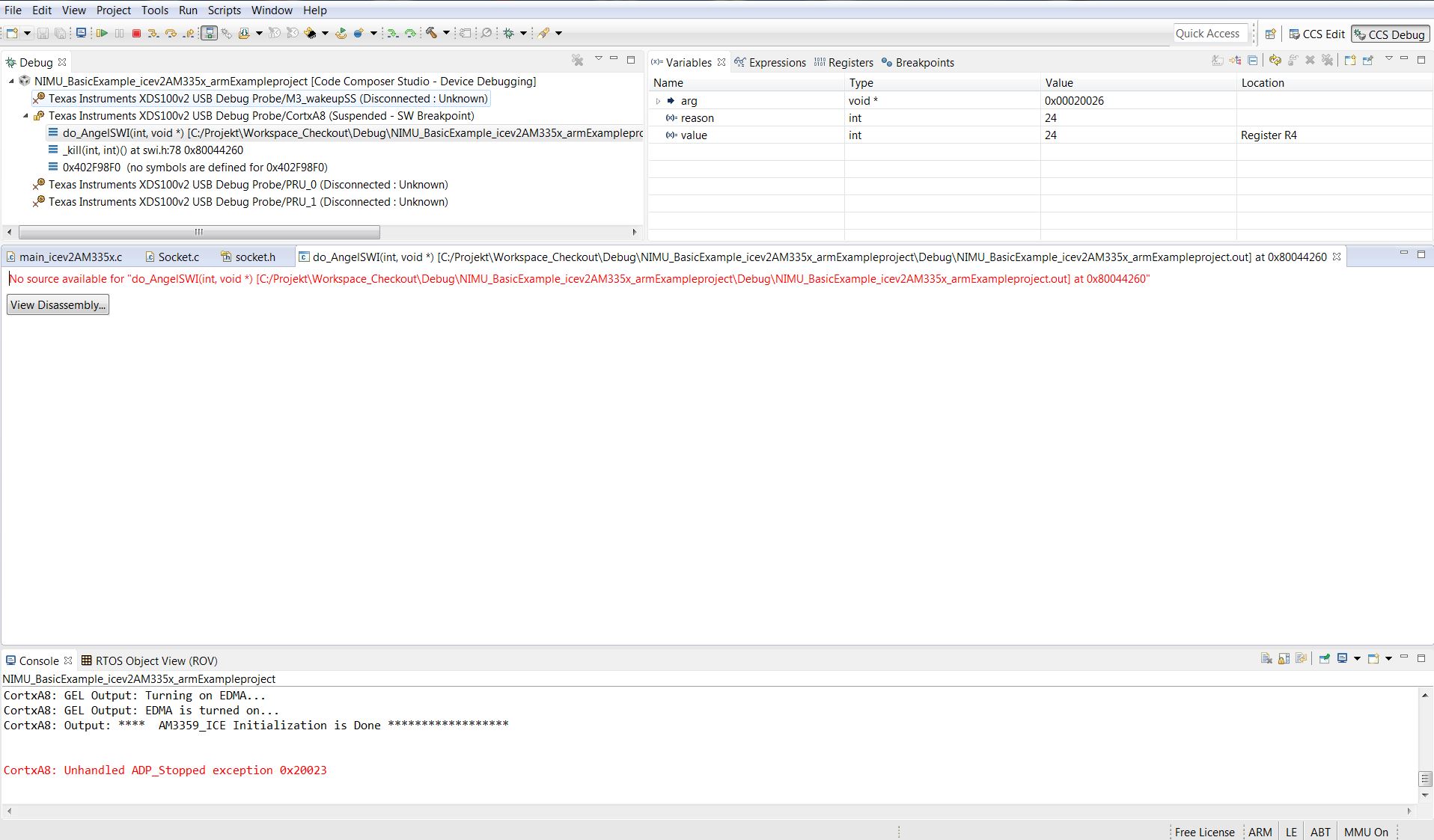
I can build the program without an error, but when I run it then an error/exception occurs.
Error: No source available for "do_AngelSWI(int, void *) [C:/Projekt\Workspace_Checkout\Debug\NIMU_BasicExample_icev2AM335x_armExampleproject\Debug\NIMU_BasicExample_icev2AM335x_armExampleproject.out] at 0x80044260"
I have debugged the program and the error occurs in the Socket.c (selfmade) File when the program tries to connect the socket (line 81).
I assume that the network interface is not ready, at this time is this correct?
If this is right, I have to wait until the network interface is ready. Can you suggest where to create the task and call the socket function so that the network interface is ready?
I will attach the main.c and the socket.c file.
CCS 6.2 / GNU v4.9.3 / EDMA3 2.12.3 / IPC 3.40.1.08 / NDK 2.25.1.11 / SYS/BIOS 6.46.4.53 / UIA 2.0.6.52 / PDK 1.0.6 / XDC 3.32.1.22
AM3359 on ICEV2
/*
* Copyright (C) 2015 Texas Instruments Incorporated - http://www.ti.com/
*
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the
* distribution.
*
* Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
* A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
* OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
* SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
* LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
* DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
* THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
* (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
/* ========================================================================== */
/* Include Files */
/* ========================================================================== */
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <xdc/std.h>
#include <xdc/runtime/Error.h>
#include <xdc/runtime/System.h>
#include <ti/sysbios/BIOS.h>
#include <ti/sysbios/knl/Task.h>
#include <ti/sysbios/family/arm/a8/Mmu.h>
#include <ti/sysbios/knl/swi.h>
#include <ti/ndk/inc/stkmain.h>
#include <ti/drv/emac/emac_drv.h>
#include <ti/drv/emac/src/v4/emac_drv_v4.h>
#include <ti/starterware/include/types.h>
#include <ti/starterware/include/hw/hw_types.h>
#include <ti/starterware/include/hw/hw_control_am335x.h>
#include <ti/starterware/include/hw/soc_am335x.h>
#include <ti/starterware/include/ethernet.h>
#include <ti/starterware/include/soc_control.h>
#include <ti/board/board.h>
/* TI-RTOS Header files */
#include <ti/drv/i2c/I2C.h>
#include <ti/drv/i2c/soc/I2C_v1.h>
/* UART Header files */
#include <ti/drv/uart/UART.h>
#include <ti/drv/uart/UART_stdio.h>
#include <ti/drv/gpio/GPIO.h>
#include <ti/drv/gpio/soc/GPIO_v1.h>
/* Header Files added for Display control */
#include "osdrv_uart.h"
#include "osdrv_version.h"
#include "osdrv_oledlcd.h"
#include "osdrv_mmu.h"
#include "plat_led.h"
#include "plat_utils.h"
#include "plat_mux.h"
/* Header Files for socket comm. */
#include <ti/ndk/inc/nettools/inc/inet.h>
// #include <ti/ndk/inc/bsd/sys/socket.h> in conflict with usertype.h
#include <Socket.h>
unsigned char uartInstance = 0;
unsigned char boardType = 0;
extern char *LocalIPAddr;
/* ========================================================================== */
/* MUX_CONFIG [PIM 20170516] */
/* ========================================================================== */
MUX_CONFIG icev2Mux[] = {
{ 0x0920 , 7 , AM335X_PIN_OUTPUT }, // mii1_txd2 -> LED_1
{ 0x091C , 7 , AM335X_PIN_OUTPUT }, // mii1_txd3 -> LED_2
{ 0x092C , 7 , AM335X_PIN_OUTPUT }, // MII1_TXCLK -> LED_3
{ 0x0880 , 7 , AM335X_PIN_OUTPUT }, // GPMC_CSN(1) -> LED_4
{ 0x09B0 , 7 , AM335X_PIN_OUTPUT }, // XDMA_EVENT_INTR(0) -> LED_5
{ 0x09B4 , 7 , AM335X_PIN_OUTPUT }, // XDMA_EVENT_INTR(1) -> LED_6
{ 0x0988 , 0 , AM335X_PIN_INPUT_PULLUP }, // I2C0_SCL
{ 0x098c , 0 , AM335X_PIN_INPUT_PULLUP }, // I2C0_SDA
{0xFFFFFFFF,0,0}
};
SYS_MMU_ENTRY applMmuEntries[] = {
{(void*)0x48300000,0}, //PWM - Non bufferable| Non Cacheable
{(void*)0x48200000,0}, //INTCPS,MPUSS - Non bufferable| Non Cacheable
{(void*)0x48100000,0}, //I2C2,McSPI1,UART3,UART4,UART5, GPIO2,GPIO3,MMC1 - Non bufferable| Non Cacheable
{(void*)0x48000000,0}, //UART1,UART2,I2C1,McSPI0,McASP0 CFG,McASP1 CFG,DMTIMER,GPIO1 -Non bufferable| Non Cacheable
{(void*)0x44E00000,0}, //Clock Module, PRM, GPIO0, UART0, I2C0, - Non bufferable| Non Cacheable
{(void*)0x4A300000,0}, //PRUSS1 - Non bufferable| Non Cacheable
{(void*)0x49000000,0}, //EDMA3 - Non bufferable| Non Cacheable
{(void*)0x4A100000,0}, //CPSW - Non bufferable| Non Cacheable
{(void*)0xFFFFFFFF,0xFFFFFFFF}
};
/* Enable the below macro to have prints on the IO Console */
//#define IO_CONSOLE
#ifndef IO_CONSOLE
#define NIMU_log UART_printf
#else
#define NIMU_log printf
#endif
/* ========================================================================== */
/* Macros */
/* ========================================================================== */
/**Phy address of the CPSW port 1*/
#define EMAC_CPSW_PORT0_PHY_ADDR_ICE2 1
/**Phy address of the CPSW port 1*/
#define EMAC_CPSW_PORT1_PHY_ADDR_ICE2 3
#define MAX_TABLE_ENTRIES 3
/* ========================================================================== */
/* Global Variables */
/* ========================================================================== */
/* GPIO pin value definitions */
#define GPIO_PIN_VAL_LOW (0U)
#define GPIO_PIN_VAL_HIGH (1U)
/* Port and pin number mask for GPIO Load pin.
Bits 7-0: Pin number and Bits 15-8: (Port number + 1) */
#define GPIO_PR1_MII_CTRL_PIN_NUM (0x04)
#define GPIO_MUX_MII_CTRL_PIN_NUM (0x0A)
#define GPIO_FET_SWITCH_CTRL_PIN_NUM (0x07)
#define GPIO_DDR_VTT_EN_PIN_NUM (0x12)
#define GPIO_PHY_0_1_RST_PIN_NUM (0x05)
#define GPIO_PR1_MII_CTRL_PORT_NUM (0x03)
#define GPIO_MUX_MII_CTRL_PORT_NUM (0x03)
#define GPIO_FET_SWITCH_CTRL_PORT_NUM (0x00)
#define GPIO_DDR_VTT_EN_PORT_NUM (0x00)
#define GPIO_PHY_0_1_RST_PORT_NUM (0x02)
/* ON Board LED pins which are connected to GPIO pins. */
typedef enum GPIO_PIN {
GPIO_PIN_PR1_MII_CTRL = 0U,
GPIO_PIN_MUX_MII_CTRL = 1U,
GPIO_PIN_FET_SWITCH_CTRL = 2U,
GPIO_PIN_DDR_VTT_EN = 3U,
GPIO_PIN_PHY_0_1_RST = 4U,
GPIO_PIN_COUNT
}GPIO_PIN;
/* GPIO Driver board specific pin configuration structure */
GPIO_PinConfig gpioPinConfigs[] = {
/* Output pin : AM335X_ICE V2_LD_PIN */
GPIO_DEVICE_CONFIG((GPIO_PR1_MII_CTRL_PORT_NUM + 1), GPIO_PR1_MII_CTRL_PIN_NUM) | GPIO_CFG_OUTPUT,
GPIO_DEVICE_CONFIG((GPIO_MUX_MII_CTRL_PORT_NUM + 1), GPIO_MUX_MII_CTRL_PIN_NUM) | GPIO_CFG_OUTPUT,
GPIO_DEVICE_CONFIG((GPIO_FET_SWITCH_CTRL_PORT_NUM + 1), GPIO_FET_SWITCH_CTRL_PIN_NUM)| GPIO_CFG_OUTPUT,
GPIO_DEVICE_CONFIG((GPIO_DDR_VTT_EN_PORT_NUM + 1), GPIO_DDR_VTT_EN_PIN_NUM) | GPIO_CFG_OUTPUT,
GPIO_DEVICE_CONFIG((GPIO_PHY_0_1_RST_PORT_NUM + 1), GPIO_PHY_0_1_RST_PIN_NUM) | GPIO_CFG_OUTPUT,
};
/* GPIO Driver call back functions */
GPIO_CallbackFxn gpioCallbackFunctions[] = {
NULL,
NULL,
NULL,
NULL,
NULL
};
/* GPIO Driver configuration structure */
GPIO_v1_Config GPIO_v1_config = {
gpioPinConfigs,
gpioCallbackFunctions,
sizeof(gpioPinConfigs) / sizeof(GPIO_PinConfig),
sizeof(gpioCallbackFunctions) / sizeof(GPIO_CallbackFxn),
0,
};
/**Task handle for EIP*/
Task_Handle main_task;
static int nimu_device_index = 0U;
//MAC_CONFIG mac_configuration;
NIMU_DEVICE_TABLE_ENTRY NIMUDeviceTable[MAX_TABLE_ENTRIES];
/** \brief Macro indicating the i2c time out value. */
#define I2C_TIMEOUT_VAL (100U)
/* ========================================================================== */
/* Constructors */
/* ========================================================================== */
/* Delay function */
void delay(unsigned int delayValue);
/* TaskFxn function */
void TaskFxn(UArg a0, UArg a1);
/* TaskSocket function */
void TaskSocket (UArg a0, UArg a1);
uint32_t ClockSynthesizerSetup(void);
extern int CpswEmacInit (STKEVENT_Handle hEvent);
extern const I2C_Config I2C_config[];
extern void SOCCtrlGetPortMacAddr(uint32_t portNum, uint8_t *pMacAddr);
extern void PhySetupAndReset(void);
/**
* \name main
* \brief Main Function
* \param none
* \return none
*
*/
int main()
{
// variables
int32_t ret;
// MMU Init
MMUInit(applMmuEntries);
// Check board type and set uart instance
boardType = UTILsGetBoardType();
if(AM335X_BOARD_TYPE_ICE == boardType)
{
uartInstance = 5;
}else if(AM335X_BOARD_TYPE_IDK == boardType)
{
uartInstance = 3;
}else if(AM335X_BOARD_TYPE_ICE_V2 == boardType)
{
uartInstance = 3;
PinMuxConfig(icev2Mux);
}
// open UART interface --> after opening Uart the programm stops with an exception
//UartOpen(uartInstance,NULL);
/* Call board init functions */
Board_initCfg boardCfg;
Task_Params taskParams;
EMAC_HwAttrs_V4 cfg;
nimu_device_index = 0U;
boardCfg = BOARD_INIT_PINMUX_CONFIG |
BOARD_INIT_MODULE_CLOCK | BOARD_INIT_UART_STDIO;
ret = Board_init(boardCfg);
if (ret != BOARD_SOK)
{
UART_printf("main: Board_init returned error code: %d\n", ret);
return -2;
}
ClockSynthesizerSetup();
/* Init GPIO driver */
GPIO_init();
/* Chip configuration MII/RMII selection */
PhySetupAndReset();
SOCCtrlCpswPortMacModeSelect(1, ETHERNET_MAC_TYPE_RMII);
SOCCtrlCpswPortMacModeSelect(2, ETHERNET_MAC_TYPE_RMII);
EMAC_socGetInitCfg(0, &cfg);
cfg.port[0].phy_addr = EMAC_CPSW_PORT0_PHY_ADDR_ICE2;
cfg.port[1].phy_addr = EMAC_CPSW_PORT1_PHY_ADDR_ICE2;
cfg.macModeFlags = EMAC_CPSW_CONFIG_MODEFLG_FULLDUPLEX| EMAC_CPSW_CONFIG_MODEFLG_IFCTLA;
EMAC_socSetInitCfg(0, &cfg);
Task_Params_init(&taskParams);
taskParams.priority = 1;
taskParams.stackSize = 0x1400;
main_task = Task_create (TaskFxn, &taskParams, NULL);
NIMUDeviceTable[nimu_device_index++].init = &CpswEmacInit ;
NIMUDeviceTable[nimu_device_index].init = NULL ;
// create task for socket
Task_Handle hMyTask;
Error_Block eb;
Error_init(&eb);
//
// Create a Task with priority 5;
// Task priority must be within the configured range of NDK priorities
// and lower priority than kernel priority NDK tasks
//
Task_Params_init(&taskParams);
taskParams.stackSize = 4096;
taskParams.priority = 5;
hMyTask = Task_create (TaskSocket , &taskParams, &eb);
//hMyTask = Task_create((Task_FuncPtr)entrypoint, &taskParams, &eb);
if (hMyTask == NULL) {
System_abort("Task create failed");
}
BIOS_start();
return -1;
}
/**
* \name TaskFxn
* \brief Task which do EIP initialization
* \show information on display [PIM 20170516]
* \param a0
* \param a1
* \return none
*
*/
void TaskFxn(UArg a0, UArg a1)
{
NIMU_log("\n\rSYS/BIOS Ethernet/IP (CPSW) Sample application, EVM IP address: %s\n\r", LocalIPAddr);
// LED example
unsigned int RunLed = 0;
unsigned char led_val = 0xff;
char t_str[8];
System_printf("enter taskFxn()\n");
UARTPutString(uartInstance,"\nTI Industrial SDK Version - ");
UARTPutString(uartInstance,IND_SDK_VERSION);
UARTPutString(uartInstance,"\n\rDevice name \t: ");
UARTPutString(uartInstance,UTILsGetDevName());
UARTPutString(uartInstance,"\n\rChip Revision \t: ");
UARTPutString(uartInstance,UTILsGetChipRevision());
sprintf(t_str,"%d",UTILsGetArmClockRate());
UARTPutString(uartInstance,"\n\rARM Clock rate \t: ");
UARTPutString(uartInstance,t_str);
System_printf("write to Display \n");
UARTPutString(uartInstance,"\n\rSYS/BIOS LED Sample application running on ");
if(AM335X_BOARD_TYPE_ICE == boardType)
{
UARTPutString(uartInstance,"ICE \n\r");
}else if(AM335X_BOARD_TYPE_IDK == boardType)
{
UARTPutString(uartInstance,"IDK \n\r");
}
else if(AM335X_BOARD_TYPE_ICE_V2 == boardType)
{
char *lcd_str1 = IND_SDK_VERSION;
char lcd_str2[]={"i2c led App"};
UARTPutString(uartInstance,"ICE V2\n\r");
OLEDInit();
OLEDShowString(1,(unsigned char *)lcd_str1,0,0);
OLEDShowString(1,(unsigned char *)lcd_str2,1,0);
OLEDDeactivateScroll();
OLEDContinuousScroll(0x01,0x01,Max_Column,0x00,0x00,0x01,0x06,0x01);
}
LEDInit();
LEDDIGOUTSetVal(led_val);
Task_sleep(2000);
led_val = 0;
LEDDIGOUTSetVal(led_val);
Task_sleep(1000);
if(AM335X_BOARD_TYPE_ICE_V2 == boardType)
{
LEDGPIOSetVal(0,16 ,0);
LEDGPIOSetVal(0,17 ,0);
LEDGPIOSetVal(0,19 ,0);
LEDGPIOSetVal(0,20 ,0);
LEDGPIOSetVal(1,30 ,0);
LEDGPIOSetVal(3,9 ,0);
}
else
{
LEDGPIOSetVal(0,0 ,0);
LEDGPIOSetVal(0,1 ,0);
LEDGPIOSetVal(0,12 ,0);
LEDGPIOSetVal(0,13 ,0);
LEDGPIOSetVal(0,16 ,0);
LEDGPIOSetVal(0,17 ,0);
LEDGPIOSetVal(0, 0,1);
LEDGPIOSetVal(0, 1,1);
LEDGPIOSetVal(0, 12,1);
LEDGPIOSetVal(0, 13,1);
LEDGPIOSetVal(0, 16,1);
LEDGPIOSetVal(0, 17,1);
}
while(1)
{
LEDDIGOUTOff(led_val);
led_val = (led_val+1)%9;
LEDDIGOUTOn(led_val);
Task_sleep(300);
if (RunLed > 0)
{
if(AM335X_BOARD_TYPE_ICE_V2 != boardType)
{
LEDDriveACT0(1);
LEDDriveACT1(0);
}
LEDDriveRun(1);
LEDDriveError(0);
}
else
{
if(AM335X_BOARD_TYPE_ICE_V2 != boardType)
{
LEDDriveACT1(1);
LEDDriveACT0(0);
}
LEDDriveError(1);
LEDDriveRun(0);
}
RunLed ^= 1;
}
}
/*
* ======== Delay function ========
*/
void delay(unsigned int delayValue)
{
volatile uint32_t delay1 = delayValue*10000;
while (delay1--) ;
}
/* I2C Instance Controlling Clock Synthesizer */
#define CLOCK_SYNTHESIZER_I2C_INST_NUM 0
/* Clock Synthesizer Device Address */
#define CLOCK_SYNTHESIZER_I2C_ADDR 0x65
#define CLOCK_SYNTHESIZER_ID_REG 0
/* Crystal load capacitor selection */
#define CLOCK_SYNTHESIZER_XCSEL 0x05
/* PLL1 Configuration Register */
#define CLOCK_SYNTHESIZER_MUX_REG 0x14
/* PDIV2 */
#define CLOCK_SYNTHESIZER_PDIV2_REG 0x16
/* PDIV3 */
#define CLOCK_SYNTHESIZER_PDIV3_REG 0x17
#define TX_LENGTH (2U)
#define RX_LENGTH (10U)
uint32_t ClockSynthesizerSetup(void)
{
uint32_t status = TRUE;
uint32_t regValue = 0U;
I2C_Params i2cParams;
I2C_Handle handle = NULL;
I2C_Transaction i2cTransaction;
char txBuf[TX_LENGTH] = {0x00, 0x01};
char rxBuf[RX_LENGTH] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00};
I2C_init();
I2C_Params_init(&i2cParams);
((I2C_HwAttrs *) I2C_config[CLOCK_SYNTHESIZER_I2C_INST_NUM].hwAttrs)->enableIntr = false;
handle = I2C_open(CLOCK_SYNTHESIZER_I2C_INST_NUM, &i2cParams);
/* Read - CLOCK_SYNTHESIZER_ID_REG */
if (FALSE != status)
{
txBuf[0] = CLOCK_SYNTHESIZER_ID_REG | 0x80U;
i2cTransaction.slaveAddress = CLOCK_SYNTHESIZER_I2C_ADDR;
i2cTransaction.writeBuf = (uint8_t *)&txBuf[0];
i2cTransaction.writeCount = 1U;
i2cTransaction.readBuf = (uint8_t *)&rxBuf[0];
i2cTransaction.readCount = 0U;
status = I2C_transfer(handle, &i2cTransaction);
if(FALSE == status)
{
NIMU_log("\n CLOCK_SYNTHESIZER_ID_REG: Data Write failed. \n");
}
}
delay(I2C_TIMEOUT_VAL);
if (FALSE != status)
{
i2cTransaction.slaveAddress = CLOCK_SYNTHESIZER_I2C_ADDR;
i2cTransaction.writeBuf = (uint8_t *)&txBuf[0];
i2cTransaction.writeCount = 0U;
i2cTransaction.readBuf = (uint8_t *)&rxBuf[0];
i2cTransaction.readCount = 1U;
status = I2C_transfer(handle, &i2cTransaction);
if(FALSE == status)
{
NIMU_log("\n CLOCK_SYNTHESIZER_ID_REG: Data Read failed. \n");
}
else
{
regValue = rxBuf[0];
}
}
delay(I2C_TIMEOUT_VAL);
if((regValue & 0x81U)!= 0x81U)
{
NIMU_log("\n Clock synthesizer: Read: Failed");
status = FALSE;
}
/** CDCE913 Clock Synthesizer configuration for RMII Clock = 50 MHz
* fout = fin/Pdiv x N/M
* fout = 50 MHz
* fin = 25 MHz
* Pdiv = 2
* N = 4
* M = 1
*/
/* Crystal load Capacitor Selection - 18pF: 0x12h(bits 7:3) */
/* Write - CLOCK_SYNTHESIZER_XCSEL */
if (FALSE != status)
{
txBuf[0] = CLOCK_SYNTHESIZER_XCSEL | 0x80U;
txBuf[1] = 0x90U;
i2cTransaction.slaveAddress = CLOCK_SYNTHESIZER_I2C_ADDR;
i2cTransaction.writeBuf = (uint8_t *)&txBuf[0];
i2cTransaction.writeCount = 2U;
i2cTransaction.readBuf = (uint8_t *)&rxBuf[0];
i2cTransaction.readCount = 0U;
status = I2C_transfer(handle, &i2cTransaction);
if(FALSE == status)
{
NIMU_log("\n CLOCK_SYNTHESIZER_XCSEL: Data Write failed. \n");
}
}
delay(I2C_TIMEOUT_VAL);
if (FALSE == status)
{
NIMU_log("\n Clock synthesizer: Write: Failed");
}
/* PLL1 Multiplexer b7:0 (PLL1) */
/* Write - CLOCK_SYNTHESIZER_MUX_REG */
if (FALSE != status)
{
txBuf[0] = CLOCK_SYNTHESIZER_MUX_REG | 0x80U;
txBuf[1] = 0x6DU;
i2cTransaction.slaveAddress = CLOCK_SYNTHESIZER_I2C_ADDR;
i2cTransaction.writeBuf = (uint8_t *)&txBuf[0];
i2cTransaction.writeCount = 2U;
i2cTransaction.readBuf = (uint8_t *)&rxBuf[0];
i2cTransaction.readCount = 0U;
status = I2C_transfer(handle, &i2cTransaction);
if(FALSE == status)
{
NIMU_log("\n CLOCK_SYNTHESIZER_MUX_REG: Data Write failed. \n");
}
}
delay(I2C_TIMEOUT_VAL);
if (FALSE == status)
{
NIMU_log("\n Clock synthesizer: Write: Failed");
}
/** b7-0(PLL1 SSC down selection by default),
* b6:0-0x02h(7-bit Y2-Output-Divider Pdiv2)
*/
/* Write - CLOCK_SYNTHESIZER_PDIV2_REG */
if (FALSE != status)
{
txBuf[0] = CLOCK_SYNTHESIZER_PDIV2_REG | 0x80U;
txBuf[1] = 0x02U;
i2cTransaction.slaveAddress = CLOCK_SYNTHESIZER_I2C_ADDR;
i2cTransaction.writeBuf = (uint8_t *)&txBuf[0];
i2cTransaction.writeCount = 2U;
i2cTransaction.readBuf = (uint8_t *)&rxBuf[0];
i2cTransaction.readCount = 0U;
status = I2C_transfer(handle, &i2cTransaction);
if(FALSE == status)
{
NIMU_log("\n CLOCK_SYNTHESIZER_PDIV2_REG: Data Write failed. \n");
}
}
delay(I2C_TIMEOUT_VAL);
if (FALSE == status)
{
NIMU_log("\n Clock synthesizer: Write: Failed");
}
/* b6:0-0x02h(7-bit Y3-Output-Divider Pdiv3) */
/* Write - CLOCK_SYNTHESIZER_PDIV3_REG */
if (FALSE != status)
{
txBuf[0] = CLOCK_SYNTHESIZER_PDIV3_REG | 0x80U;
txBuf[1] = 0x02U;
i2cTransaction.slaveAddress = CLOCK_SYNTHESIZER_I2C_ADDR;
i2cTransaction.writeBuf = (uint8_t *)&txBuf[0];
i2cTransaction.writeCount = 2U;
i2cTransaction.readBuf = (uint8_t *)&rxBuf[0];
i2cTransaction.readCount = 0U;
status = I2C_transfer(handle, &i2cTransaction);
if(FALSE == status)
{
NIMU_log("\n CLOCK_SYNTHESIZER_PDIV3_REG: Data Write failed. \n");
}
}
delay(I2C_TIMEOUT_VAL);
if (FALSE == status)
{
NIMU_log("\n Clock synthesizer: Write: Failed");
}
I2C_close(handle);
return status;
}
void PhySetupAndReset(void)
{
/* PR1_MII_CTL */
GPIO_write(GPIO_PIN_PR1_MII_CTRL, GPIO_PIN_VAL_HIGH);
/* MUX MII CONTROL */
GPIO_write(GPIO_PIN_MUX_MII_CTRL, GPIO_PIN_VAL_HIGH);
/* FET SWITCH CONTROL */
GPIO_write(GPIO_PIN_FET_SWITCH_CTRL, GPIO_PIN_VAL_HIGH);
/* DDR VTT ENABLE */
GPIO_write(GPIO_PIN_DDR_VTT_EN, GPIO_PIN_VAL_HIGH);
/* Phy 0 & 1 reset */
GPIO_write(GPIO_PIN_PHY_0_1_RST, GPIO_PIN_VAL_LOW);
delay(100);
GPIO_write(GPIO_PIN_PHY_0_1_RST, GPIO_PIN_VAL_HIGH);
delay(100);
}
/**
* \name TaskSocket
* \Task to call the socket function in Socket.c
* \param a0
* \param a1
* \return none
*
*/
void TaskSocket (UArg a0, UArg a1)
{
System_printf("enter taskSocket()\n");
// define IP-Addr.
IPN IPAddr;
IPAddr = inet_addr("192.168.1.4");
// call function
EchoTcp(IPAddr);
Task_exit();
}
/*
* Socket.c
*
* Created on: 17. Mai 2017
* Author: PirklbauerMa
*/
/* ========================================================================== */
/* Includes */
/* ========================================================================== */
#include <xdc/std.h>
#include <xdc/runtime/System.h>
#include <ti/sysbios/knl/Task.h>
#include <ti/ndk/inc/bsd/sys/socket.h>
#include "ti/ndk/inc/bsd/socketndk.h"
// The following header should not be included referring to the NDK Reference Guide
// No header of the ti/ndk/inc should be included
/*
#include "ti/ndk/inc/socketndk.h"
#include "ti/ndk//inc/os/osif.h"
#include "ti/ndk/inc/usertype.h"
*/
/* ========================================================================== */
/* Constructors */
/* ========================================================================== */
// void socket_task(int IPAddr, int TcpPort);
// Example for file descriptor
/*
void socket_task(int IPAddr, int TcpPort)
{
SOCKET s;
// Open the file session
fdOpenSession(TaskSelf());
// < socket application code >
// Close the file session
fdCloseSession(TaskSelf());
}
*/
void EchoTcp( IPN IPAddr )
{
SOCKET s = INVALID_SOCKET;
struct sockaddr_in sin1;
int i;
char *pBuf = 0;
struct timeval timeout;
char test[4096];
// Allocate the file descriptor environment for this Task
fdOpenSession( (HANDLE)Task_self() );
System_printf("\n== Start TCP Echo Client Test ==\n");
// Create test socket
s = socket(AF_INET, SOCK_STREAM, IPPROTO_TCP); // returns a file descriptor representing the socket
if( s == INVALID_SOCKET ) // INVALID_SOCKET stands for -1
{
System_printf("failed socket create (%d)\n",fdError());
goto leave;
}
// Prepare address for connect
bzero( &sin1, sizeof(struct sockaddr_in) );
sin1.sin_family = AF_INET;
sin1.sin_addr.s_addr = IPAddr;
sin1.sin_port = htons(7);
// Configure our Tx and Rx timeout to be 5 seconds
timeout.tv_sec = 5;
timeout.tv_usec = 0;
setsockopt( s, SOL_SOCKET, SO_SNDTIMEO, &timeout, sizeof( timeout ) );
setsockopt( s, SOL_SOCKET, SO_RCVTIMEO, &timeout, sizeof( timeout ) );
// Connect socket - &sin1 is the pointer to the serv_addr
if( connect( s, (PSA) &sin1, sizeof(sin1) ) < 0 )
{
System_printf("failed connect (%d)\n",fdError());
goto leave;
}
// Allocate a working buffer
if( !(pBuf = malloc( 4096 )) )
{
System_printf("failed temp buffer allocation\n");
goto leave;
}
// Fill buffer with a test pattern + Fill also test array for comparison
for(i=0; i<4096; i++)
*(pBuf+i) = (char)i;
test[1] = (char)i;
// Send the buffer - return is the amount of successfully sent bytes
if( send( s, pBuf, 4096, 0 ) < 0 )
{
System_printf("send failed (%d)\n",fdError());
goto leave;
}
// Try and receive the test pattern back - returns the number of bytes received .. data is in Buffer in pBuf
i = recv( s, pBuf, 4096, MSG_WAITALL );
if( i < 0 )
{
System_printf("recv failed (%d)\n",fdError());
goto leave;
}
// Verify reception size and pattern
if( i != test )
{
System_printf("received %d (not %d) bytes\n",i, test);
goto leave;
}
for(i=0; i<test; i++)
if( *(pBuf+i) != (char)i )
{
System_printf("verify failed at byte %d\n",i);
break;
}
// If here, the test passed
if( i==test )
System_printf("passed\n");
leave:
if( pBuf )
free( pBuf );
if( s != INVALID_SOCKET )
fdClose( s );
System_printf("== End TCP Echo Client Test ==\n\n");
// Free the file descriptor environment for this Task
fdCloseSession( (HANDLE)Task_self() );
Task_exit();
}