Other Parts Discussed in Thread: TSC2046,
Hi.
Is my understanding correct?
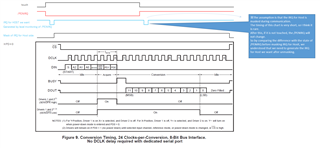
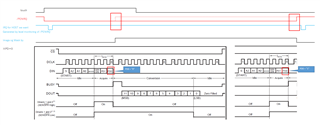
1. When the touch panel is touched, /PENIRQ goes "LOW", and when SPI communication is started, it goes "HIGH".
2. After sending PD0=0 by the control command, the pen touch function is enabled again when the AD conversion is completed, so if the touch screen is still touched, /PENIRQ will immediately go "LOW" again.
I think the /PENIRQ signal does not change when the finger is removed from the touch panel.
I would like to know if there is a recommended method for detecting when a finger is removed.
Best Regards