


Part Number: ADS1256
Hello,
I need some help with some issues when communicating via SPI between DSP F28335 and ADS1256. The ADS1256 was not responding to any command, and MISO always return FF whenever I read register or data. I doubt it that the command sent to ADC was not recognized, so it had no response. Data Ready was connected to a GPIO, when powering up, data ready signal is with 33us period, namely around 2.4 us high, then around 30.6 us low,
The F28335 SPI SCLK is set at 1.25 MHz, with sending out data on rising edge and receiving data on falling edge, no phase delay, idle low.
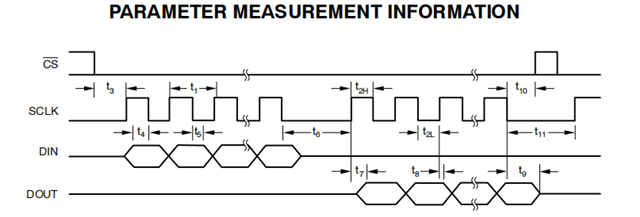
I have attached the wave form showing SCLK, CS and MOSI. The timing between SCLK, CS and MOSI meets the timing specification shown below. And the consecutive MOSI bytes also meets timing requirements. The MISO was not shown, but in the test, it always stayed high.
The following figure showed when writing a single byte. Blue line -- CS, Yellow line -- SCLK, Purple line -- MOSI.

The following figure shows when writing multiple bytes. Green line -- CS, Purple line -- SCLK, Blue line -- MOSI

I have also attached the configuration code. This is ADC set up.
// adc_spi.c
#include "adc_spi.h"
#include "DSP28x_Project.h"
#include "spi.h"
enum
{
REG_STATUS = 0x0000, // x1H
REG_MUX = 0x0100, // 01H
REG_ADCON = 0x0200, // 20H
REG_DRATE = 0x0300, // F0H
REG_IO = 0x0400, // E0H
REG_OFC0 = 0x0500, // xxH
REG_OFC1 = 0x0600, // xxH
REG_OFC2 = 0x0700, // xxH
REG_FSC0 = 0x0800, // xxH
REG_FSC1 = 0x0900, // xxH
REG_FSC2 = 0x0A00, // xxH
};
// Command Table
enum
{
CMD_WAKEUP = 0x0000, // Completes SYNC and Exits Standby Mode 0000 0000 (00h)
CMD_RDATA = 0x0100, // Read Data 0000 0001 (01h)
CMD_RDATAC = 0x0300, // Read Data Continuously 0000 0011 (03h)
CMD_SDATAC = 0x0F00, // Stop Read Data Continuously 0000 1111 (0Fh)
CMD_RREG = 0x1000, // Read from REG rrr 0001 rrrr (1xh)
CMD_WREG = 0x5000, // Write to REG rrr 0101 rrrr (5xh)
CMD_SELFCAL = 0xF000, // Offset and Gain Self-Calibration 1111 0000 (F0h)
CMD_SELFOCAL= 0xF100, // Offset Self-Calibration 1111 0001 (F1h)
CMD_SELFGCAL= 0xF200, // Gain Self-Calibration 1111 0010 (F2h)
CMD_SYSOCAL = 0xF300, // System Offset Calibration 1111 0011 (F3h)
CMD_SYSGCAL = 0xF400, // System Gain Calibration 1111 0100 (F4h)
CMD_SYNC = 0xFC00, // Synchronize the A/D Conversion 1111 1100 (FCh)
CMD_STANDBY = 0xFD00, // Begin Standby Mode 1111 1101 (FDh)
CMD_RESET = 0xFE00, // Reset to Power-Up Values 1111 1110 (FEh)
//CMD_WAKEUP = 0xFF, // Completes SYNC and Exits Standby Mode (FFh)
};
static void bsp_DelayMS(Uint16 nms);
static void bsp_DelayUS(Uint16 nus);
static void ADS1256_WaitDRDY(void);
static void ADS1256_ResetHard(void);
static void ADS1256_DelaySCLK(void);
static void ADS1256_DelayDATA(void);
static void ADS1256_DelayCS(void);
static void ADS1256_DelaySYNC(void);
static void ADS1256_WriteCmd(Uint16 _cmd);
//static void ADS1256_WriteReg(Uint16 _RegID, Uint16 _RegValue);
//static Uint16 ADS1256_ReadReg(Uint16 _RegID);
static Uint32 ADS1256_ReadData(void);
static void ADS1256_SetChannal(Uint16 _ch);
//static void ADS1256_StopScan(void);
ADS1256_VAR_T g_tADS1256;
static const Uint16 s_tabDataRate[ADS1256_DRATE_MAX] =
{
0xF000, // 30K SPS
0xE000, // 15K
0xD000, // 7.5K
0xC000, // 3750
0xB000, // 2000
0xA100, // 1000
0x9200, // 500
0x8200, // 100
0x7200, // 60
0x6300, // 50
0x5300, // 30
0x4300, // 25
0x3300, // 15
0x2300, // 10
0x1300, // 5
0x0300 // 2.5
};
void bsp_DelayUS(Uint16 nus)
{
DELAY_US(nus);
}
void ADS1256_Init(){
EALLOW;
// CS
GpioCtrlRegs.GPAMUX1.bit.GPIO6=0; // GPIO
GpioCtrlRegs.GPAPUD.bit.GPIO6=0; // Enable internal pullup
GpioCtrlRegs.GPADIR.bit.GPIO6=1; // Output
//RST
GpioCtrlRegs.GPAMUX1.bit.GPIO7=0; // GPIO
GpioCtrlRegs.GPAPUD.bit.GPIO7=0; // Enable internal pullup
GpioCtrlRegs.GPADIR.bit.GPIO7=1; // Output
//SYNC
GpioCtrlRegs.GPAMUX1.bit.GPIO8=0; // GPIO
GpioCtrlRegs.GPAPUD.bit.GPIO8=0; // Enable internal pullup
GpioCtrlRegs.GPADIR.bit.GPIO8=1; // Output
//DATA READY
SysCtrlRegs.PCLKCR3.bit.GPIOINENCLK = 1; // GPIO input clock
GpioCtrlRegs.GPAMUX1.bit.GPIO9=0; // GPIO
GpioCtrlRegs.GPAPUD.bit.GPIO9=1; // Disable internal pullup
GpioCtrlRegs.GPADIR.bit.GPIO9=0; // Input
GpioCtrlRegs.GPAQSEL1.bit.GPIO9= 0;
GpioDataRegs.GPASET.bit.GPIO6=1; // Set value
GpioDataRegs.GPASET.bit.GPIO7=1; // Set value
GpioDataRegs.GPASET.bit.GPIO8=1; // Set value
EDIS;
};
// t11 -> min 1/7.68M * 4 = 0.52 us Delay for final SCLK falling edge to first
// rising edge of next command, WREG, RREG, RDATA
// RESET and SYNC must be low for at least 0.52 us to be effective
static void ADS1256_DelaySCLK(void)
{
bsp_DelayUS(1);
}
// t11 -> min 1/7.68M * 24 = 3.12 us Delay for final SCLK falling edge to first
// rising edge of next command, RDATAC, SYNC
static void ADS1256_DelaySYNC(void)
{
bsp_DelayUS(5);
}
// t8 -> min 1/7.68M * 8 = 1.04 us Delay for final SCLK falling edge to first
// CS goes high
static void ADS1256_DelayCS(void)
{
bsp_DelayUS(3);
}
// t6 -> min 50 * 0.13uS = 6.5uS
// Delay from last SCLK edge for DIN to first SCLK rising edge for
// DOUT: RDATA, RDATAC,RREG Commands
static void ADS1256_DelayDATA(void)
{
bsp_DelayUS(10);
}
// SCLK period 37.5 M / 60 = 625K
// 1/625k = 1.6 us
// Data ready time
static void ADS1256_WaitDRDY(void)
{
Uint32 i;
for (i = 0; i < 40000000; i++)
{
if (DRDY_IS_LOW())
{
break;
}
}
}
// Write register
void ADS1256_WriteReg(Uint16 _RegID, Uint16 _RegValue)
{
ADS1256_WaitDRDY();
spi_xmit(CMD_WREG | _RegID);
DELAY_US(10);
ADS1256_WaitDRDY();
spi_xmit(0x0000);
DELAY_US(10);
ADS1256_WaitDRDY();
spi_xmit(_RegValue);
}
// Send command
static void ADS1256_WriteCmd(Uint16 _cmd)
{
DELAY_US(10);
spi_xmit(_cmd);
DELAY_US(10);
}
void ADS1256_CfgADC(ADS1256_GAIN_E _gain, ADS1256_DRATE_E _drate)
{
g_tADS1256.Gain = _gain;
g_tADS1256.DataRate = _drate;
ADS1256_StopScan();
ADS1256_ResetHard();
ADS1256_WriteCmd(CMD_RESET);
DELAY_US(60);
ADS1256_WriteCmd(CMD_SDATAC);
DELAY_US(60);
{
Uint16 buf[4];
buf[0] = (((0 << 3) | (1 << 2) | (0 << 1))<<8);
// write 00000100, MSB, auto-calibration, buffer disable
buf[1] = 0x0800;
// output mux 00001000
buf[2] = (((0 << 5) | (0 << 3) | (_gain << 0))<<8);
// no clock out, sensor detect off, gain 1
buf[3] = s_tabDataRate[_drate];
//ADS1256_DelaySCLK();
DELAY_US(20);
spi_xmit(CMD_WREG | 0);
DELAY_US(20);
spi_xmit(0x0303);
DELAY_US(20);
spi_xmit(buf[0]);
DELAY_US(20);
spi_xmit(buf[1]);
DELAY_US(20);
spi_xmit(buf[2]);
DELAY_US(20);
spi_xmit(buf[3]);
DELAY_US(20);
}
DELAY_US(50);
ADS1256_WriteCmd(CMD_SYNC);
DELAY_US(20);
ADS1256_WriteCmd(CMD_WAKEUP);
DELAY_US(800);
}
static void ADS1256_ResetHard(void)
{
RST(0);
DELAY_US(10);
RST(1);
SYNC(0);
bsp_DelayUS(2);
DELAY_US(10);
SYNC(1);
DELAY_US(800);
ADS1256_WaitDRDY(); /* Ready time 630us */
}
Uint16 ADS1256_ReadReg(Uint16 _RegID)
{
Uint16 read;
read = 0;
ADS1256_WaitDRDY();
DELAY_US(20);
spi_xmit(CMD_RREG | _RegID);
DELAY_US(20);
spi_xmit(0x0000);
DELAY_US(20);
spi_xmit(0xEEEE);
read = SpiaRegs.SPIRXBUF;
DELAY_US(10);
return read;
}
Uint16 ADS1256_ReadChipID(void)
{
Uint16 id;
id = ADS1256_ReadReg(REG_STATUS);
return (id >> 4);
}
This is SPI set up.
#include "spi.h"
#include "SCI.h"
#include "adc.h"
//SPI send out data
void spi_xmit(Uint16 a){
SpiaRegs.SPISTS.bit.INT_FLAG = 1;
SpiaRegs.SPITXBUF = a;
while(!SpiaRegs.SPISTS.bit.INT_FLAG){}
//DELAY_US(20);
}
void spi_init(){
// Initialize spigpio:16--SIMO, 17--SOMI, 18--CLK, 19--STEA
EALLOW;
GpioCtrlRegs.GPAPUD.bit.GPIO16 = 0; //Enable pull-up on GPIO16 (SPISIMOA)
GpioCtrlRegs.GPAPUD.bit.GPIO17 = 0; //Enable pull-up on GPIO17 (SPISOMIA)
GpioCtrlRegs.GPAPUD.bit.GPIO18 = 0; //Enable pull-up on GPIO18 (SPICLKA)
GpioCtrlRegs.GPAPUD.bit.GPIO19 = 0; //Enable pull-up on GPIO19 (SPISTEA)
//
// Set qualification for selected pins to asynch only
// This will select asynch (no qualification) for the selected pins.
// Comment out other unwanted lines.
//
GpioCtrlRegs.GPAQSEL2.bit.GPIO16 = 3; // Asynch input GPIO16 (SPISIMOA)
GpioCtrlRegs.GPAQSEL2.bit.GPIO17 = 3; // Asynch input GPIO17 (SPISOMIA)
GpioCtrlRegs.GPAQSEL2.bit.GPIO18 = 3; // Asynch input GPIO18 (SPICLKA)
GpioCtrlRegs.GPAQSEL2.bit.GPIO19 = 3; // Asynch input GPIO19 (SPISTEA)
//
// Configure SPI-A pins using GPIO regs
// This specifies which of the possible GPIO pins will be SPI
// functional pins.
// Comment out other unwanted lines.
//
GpioCtrlRegs.GPAMUX2.bit.GPIO16 = 1; // Configure GPIO16 as SPISIMOA
GpioCtrlRegs.GPAMUX2.bit.GPIO17 = 1; // Configure GPIO17 as SPISOMIA
GpioCtrlRegs.GPAMUX2.bit.GPIO18 = 1; // Configure GPIO18 as SPICLKA
GpioCtrlRegs.GPAMUX2.bit.GPIO19 = 1; // Configure GPIO19 as SPISTEA
EDIS;
SpiaRegs.SPICCR.all = 0x0008; // Reset SPI, send out on rising edge, receive on falling edge, 8 bit
SpiaRegs.SPICTL.all = 0x0006; //no phase delay master mode
SpiaRegs.SPIBRR = 0x001D; // SPICLK(SPICLK 37.5M/(29+1))
SpiaRegs.SPIPRI.bit.FREE = 1; // Free run
//SPI FIFO
SpiaRegs.SPIFFTX.all = 0xE040; //enable SPI TX interrupt
SpiaRegs.SPICCR.all= 0x0088; // Renable SPI
}
interrupt void spi_rx_isr(void){
SpiaRegs.SPIFFRX.bit.RXFFINTCLR = 1; //Clear inerrupt
PieCtrlRegs.PIEACK.bit.ACK6 = 1; //
}
interrupt void spi_tx_isr(void){
SpiaRegs.SPIFFTX.bit.TXFFINTCLR = 1; // Clear interrupt
PieCtrlRegs.PIEACK.bit.ACK6 = 1; //
}
Look forward for your help.
Thanks
Chad







