Other Parts Discussed in Thread: ADS131E08
Hello Support Team,
Currently, I am working on the ADS131E08EVM-PDK dev-kit with the STM32H745 discovery board.
Scenario 1.
- Using normal SPI transmit-receive function read/write operation working fine with ADS131E08 register.
Scenario 2.
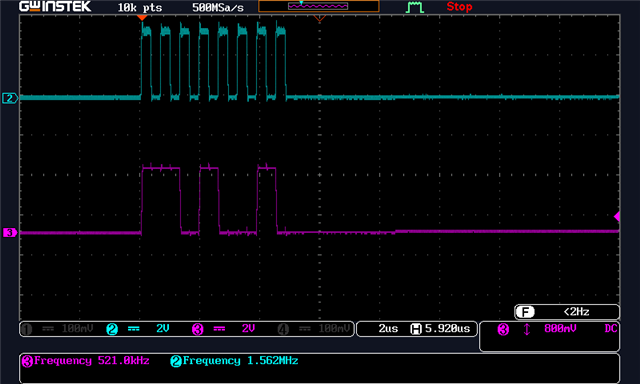
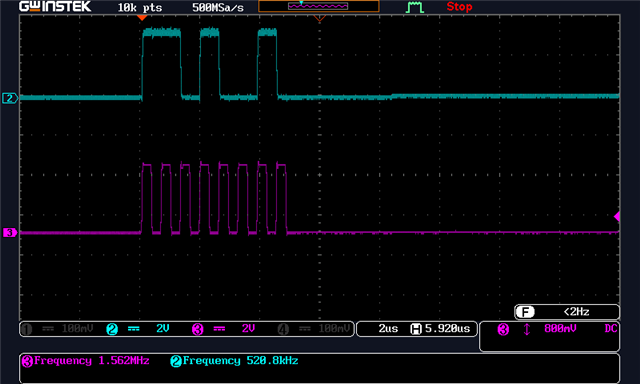
- When I have configured the DMA for SPI and used the transmit-receive_DMA function for the read/write register from ADS131E08 using the STM32H745 discovery board.
- Then getting some garbage value.
Any specific configuration is required for the STM32H745 discovery board?
Any example is available for SPI+DMA communication for this ADS131E08 EVK. It would be great for me.
Environment Details:
Hardware : ADS13xE08EVM Rev A , STM32H745 Discovery board.
IDE Setup : STM32 Cube Version: 1.8.0