Other Parts Discussed in Thread: ADS131M08,
Hi,
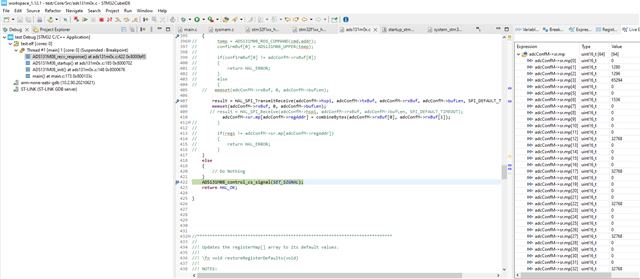
I am trying to interface Stm32f103 controller with ADS131m08 Evaluation board and i am facing issue in reading the register back such as when ever i try to write some register let say Clock register i try to read it back so it replace the value in the register refer for the same is given in the snippet share below .
Kindly help me in reading back the register and i have already try the method given in the reference code for ADS131m08 but it didnot work.
I am attaching my ads131m0x.c file in this there are 2 function one is for send command and other is recv_response so I am not able to read response of the register that i write but my recv_response work well with the commands.
Please help me in reading back the register correctly.
/**
* \copyright Copyright (C) 2019 Texas Instruments Incorporated - http://www.ti.com/
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the
* distribution.
*
* Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
* A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
* OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
* SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
* LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
* DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
* THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
* (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
#include "ads131m0x.h"
#include "stm32f1xx_hal.h"
#include "stm32f1xx_it.h"
#include "string.h"
#include "gpio.h"
#include <stdlib.h>
//****************************************************************************
//
// Internal variables
//
//****************************************************************************
_adcConfM* adcConfM = NULL;
_ADS131M08_ch ch;
#define SPI_DEFAULT_TIMEOUT 100U
//****************************************************************************
//
// Internal function prototypes
//
//****************************************************************************
//
//uint8_t buildSPIarray(const uint16_t opcodeArray[], uint8_t numberOpcodes, uint8_t byteArray[]);
//uint16_t enforce_selected_device_modes(uint16_t data);
//uint8_t getWordByteLength(void);
uint16_t getRegisterValue(uint8_t address);
HAL_StatusTypeDef ADS131M08_send_command(uint16_t cmd, uint16_t addr, uint16_t regs);
HAL_StatusTypeDef ADS131M08_recv_response(uint16_t cmd, uint16_t addr, uint16_t regs, _sendFlg sendFlg);
extern void ADS131M08_control_cs_signal(_signalState onOff);
extern GPIO_PinState ADS131M08_read_cs_signal();
void restoreRegisterDefaults(void);
extern uint8_t ADS131M08_wait_drdy_int(const uint32_t timeout_10ms);
HAL_StatusTypeDef ADS131M08_startup();
float ADS131M08_convert_to_mVolt(uint32_t reg);
void delay_us(uint32_t microseconds);
void toggleRESET(void);
uint8_t confirmBuf[2];
//*****************************************************************************
//
//! Getter function to access registerMap array from outside of this module.
//!
//! \fn uint16_t getRegisterValue(uint8_t address)
//!
//! NOTE: The internal registerMap arrays stores the last know register value,
//! since the last read or write operation to that register. This function
//! does not communicate with the device to retrieve the current register value.
//! For the most up-to-date register data or retrieving the value of a hardware
//! controlled register, it is recommend to use readSingleRegister() to read the
//! current register value.
//!
//! \return unsigned 16-bit register value.
//
//*****************************************************************************
uint16_t getRegisterValue(uint8_t address)
{
assert(address < NUM_REGISTERS);
return adcConfM->sr.mp[address];
}
//*****************************************************************************
//
//! Example start up sequence for the ADS131M0x.
//!
//! \fn void adcStartup(void)
//!
//! Before calling this function, the device must be powered,
//! the SPI/GPIO pins of the MCU must have already been configured,
//! and (if applicable) the external clock source should be provided to CLKIN.
//!
//! \return None.
//
//*****************************************************************************
HAL_StatusTypeDef ADS131M08_init(_adcType adcType, SPI_HandleTypeDef* hspi)
{
HAL_StatusTypeDef result = HAL_OK;
_adcConfM* adcConf;
if(adcType == ADS131M08_ADC1)
{
adcConfM = (_adcConfM*)malloc(sizeof(_adcConfM));
memset(adcConfM, 0, sizeof(_adcConfM));
adcConfM->type = adcType;
adcConfM->stat = ADS131M08_INIT;
adcConfM->hspi = hspi;
adcConfM->nReset.port = SYNC_RESET_GPIO_Port;
adcConfM->nReset.pin = SYNC_RESET_Pin;
adcConfM->cs.port = CS_GPIO_Port;
adcConfM->cs.pin = CS_Pin;
adcConfM->nDrdy.port = DRDY_GPIO_Port;
adcConfM->nDrdy.pin = DRDY_Pin;
adcConfM->bufLen = M08_WORDS_IN_FRAME * M08_WORD_LENGTH; // 9 Words x 24 Bits
adcConfM->rxBuf = (uint8_t*)malloc(adcConfM->bufLen);
memset(adcConfM->rxBuf, 0, adcConfM->bufLen);
adcConfM->txBuf = (uint8_t*)malloc(adcConfM->bufLen);
memset(adcConfM->txBuf, 0, adcConfM->bufLen);
adcConf = adcConfM;
}
else
{
result = HAL_ERROR;
return result;
}
// Reset Sequence
HAL_GPIO_WritePin(adcConf->cs.port, adcConf->cs.pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(adcConf->nReset.port, adcConf->nReset.pin, GPIO_PIN_RESET);
result = ADS131M08_startup();
if(result == HAL_OK)
{
adcConf->stat = ADS131M08_NORMAL;
}
else
{
adcConf->stat = ADS131M08_INIT_FAIL;
}
return result;
}
HAL_StatusTypeDef ADS131M08_startup()
{
int i=0;
uint16_t regs=0;
/* (OPTIONAL) Provide additional delay time for power supply settling */
HAL_Delay(50);
/* (REQUIRED) Set nRESET pin high for ADC operation */
HAL_GPIO_WritePin(adcConfM->nReset.port, adcConfM->nReset.pin, GPIO_PIN_SET);
/* (OPTIONAL) Toggle nRESET pin to ensure default register settings. */
/* NOTE: This also ensures that the device registers are unlocked. */
toggleRESET();
/* (REQUIRED) Initialize internal 'registerMap' array with device default settings */
restoreRegisterDefaults();
/* (OPTIONAL) Validate first response word when beginning SPI communication: (0xFF20 | CHANCNT) */
ADS131M08_send_command(ADS131M08_CMD_NULL, 0, 0);
ADS131M08_send_command(ADS131M08_CMD_UNLOCK, 0, 0);
if(HAL_OK != ADS131M08_recv_response(ADS131M08_CMD_UNLOCK, 0, 0, SEND_SYSTEM_CMD))
{
return HAL_ERROR;
}
ADS131M08_send_command(ADS131M08_CMD_WAKEUP, 0, 0);
if(HAL_OK != ADS131M08_recv_response(ADS131M08_CMD_WAKEUP, 0, 0, SEND_SYSTEM_CMD))
{
return HAL_ERROR;
}
/* (OPTIONAL) Define your initial register settings here */
regs=(CLOCK_DEFAULT & ~CLOCK_OSR_MASK);
regs|=CLOCK_OSR_256;
ADS131M08_send_command(ADS131M08_CMD_WREG,CLOCK_ADDRESS, regs);
if(HAL_OK != ADS131M08_recv_response(ADS131M08_CMD_RREG, CLOCK_ADDRESS, 0, SEND_REGISTER_CMD))
{
return HAL_ERROR;
}
/* (REQUIRED) Configure MODE register settings
* NOTE: This function call is required here for this particular code implementation to work.
* This function will enforce the MODE register settings as selected in the 'ads131m0x.h' header file.
*/
ADS131M08_send_command(ADS131M08_CMD_WREG,MODE_ADDRESS, MODE_DEFAULT);
/* (OPTIONAL) Read back all registers */
// Wakeup device
// Ignore the first 5 conversion results to allow for the
// output buffers to fill-up and the SINC3 filter to settle
for(i = 0; i < 5; i++)
{
ADS131M08_wait_drdy_int(100);
ADS131M08_control_cs_signal(RESET_SIGNAL);
HAL_SPI_Receive(adcConfM->hspi, adcConfM->rxBuf, adcConfM->bufLen, SPI_DEFAULT_TIMEOUT);
ADS131M08_control_cs_signal(SET_SIGNAL);
}
return HAL_OK;
/* (OPTIONAL) Check STATUS register for faults */
}
//*****************************************************************************
//
//! Toggles the "nSYNC/nRESET" pin to trigger a reset
//! (LOW, delay 2 ms, then HIGH).
//!
//! \fn void toggleRESET(void)
//!
//! \return None.
//
//*****************************************************************************
void toggleRESET(void)
{
/* --- INSERT YOUR CODE HERE --- */
HAL_GPIO_WritePin(adcConfM->nReset.port, adcConfM->nReset.pin, GPIO_PIN_RESET);
// Minimum /RESET pulse width (tSRLRST) equals 2,048 CLKIN periods (1 ms @ 2.048 MHz)
HAL_Delay(2);
HAL_GPIO_WritePin(adcConfM->nReset.port, adcConfM->nReset.pin, GPIO_PIN_SET);
// tREGACQ delay before communicating with the device again
delay_us(5);
// NOTE: The ADS131M0x's next response word should be (0xFF20 | CHANCNT).
// A different response may be an indication that the device did not reset.
// Update register array
// restoreRegisterDefaults();
// Write to MODE register to enforce mode settings
}
//*****************************************************************************
//
//! Sends the specified SPI command to the ADC (NULL, STANDBY, or WAKEUP).
//!
//! \fn uint16_t sendCommand(uint16_t opcode)
//!
//! \param opcode SPI command byte.
//!
//! NOTE: Other commands have their own dedicated functions to support
//! additional functionality.
//!
//! \return ADC response byte (typically the STATUS byte).
//
//*****************************************************************************
HAL_StatusTypeDef ADS131M08_send_command(uint16_t cmd, uint16_t addr, uint16_t regs)
{
HAL_StatusTypeDef result = HAL_OK;
_sendFlg sendFlg = SEND_SYSTEM_CMD;
GPIO_PinState pinStat = GPIO_PIN_RESET;
switch(cmd)
{
case ADS131M08_CMD_NULL:
case ADS131M08_CMD_RESET:
case ADS131M08_CMD_STANDBY:
case ADS131M08_CMD_WAKEUP:
case ADS131M08_CMD_LOCK:
case ADS131M08_CMD_UNLOCK:
adcConfM->txBuf[0] = ADS131M08_UPPER(cmd);
adcConfM->txBuf[1] = ADS131M08_LOWER(cmd);
adcConfM->txBuf[2] = 0;
adcConfM->txBuf[3] = 0;
adcConfM->command = cmd;
adcConfM->regAddr = 0;
sendFlg = SEND_SYSTEM_CMD;
break;
case ADS131M08_CMD_RREG: // ADS131A04_CMD_RREGS
adcConfM->txBuf[0] = ADS131M08_UPPER(ADS131M08_REG_COMMAND(cmd,addr));
adcConfM->txBuf[1] = ADS131M08_LOWER(ADS131M08_REG_COMMAND(cmd,addr));
adcConfM->txBuf[2] = 0;
adcConfM->txBuf[3] = 0;
adcConfM->command = cmd;
adcConfM->regAddr = addr;
adcConfM->regs = regs;
sendFlg = SEND_REGISTER_CMD;
break;
case ADS131M08_CMD_WREG:
adcConfM->txBuf[0] = ADS131M08_UPPER(ADS131M08_REG_COMMAND(cmd,addr));
adcConfM->txBuf[1] = ADS131M08_LOWER(ADS131M08_REG_COMMAND(cmd,addr));
adcConfM->txBuf[2] = ADS131M08_UPPER(regs);
adcConfM->txBuf[3] = ADS131M08_LOWER(regs);
adcConfM->command = cmd;
adcConfM->regAddr = addr;
adcConfM->regs = regs;
adcConfM->sr.mp[addr] = regs;
sendFlg = SEND_REGISTER_CMD;
break;
default:
break;
}
// Check availablity to send data
while(GPIO_PIN_RESET == pinStat)
{
pinStat = ADS131M08_read_cs_signal();
}
ADS131M08_control_cs_signal(RESET_SIGNAL);
result = HAL_SPI_TransmitReceive(adcConfM->hspi, adcConfM->txBuf, adcConfM->rxBuf, adcConfM->bufLen, SPI_DEFAULT_TIMEOUT);
ADS131M08_control_cs_signal(SET_SIGNAL);
if(sendFlg == SEND_SYSTEM_CMD)
{
adcConfM->response = combineBytes(adcConfM->rxBuf[0], adcConfM->rxBuf[1]);
}
else if(sendFlg == SEND_REGISTER_CMD)
{
adcConfM->sr.mp[adcConfM->regAddr] = regs;
}
if(HAL_OK != result)
{
ADS131M08_control_cs_signal(SET_SIGNAL);
}
else
{
// DO NOTHING
}
return result;
}
HAL_StatusTypeDef ADS131M08_recv_response(uint16_t cmd, uint16_t addr, uint16_t regs, _sendFlg sendFlg)
{
uint16_t temp;
// Initialize buffer to send NULL command
HAL_StatusTypeDef result = HAL_OK;
memset(adcConfM->txBuf, 0, adcConfM->bufLen);
// Check availablity to send data
while(GPIO_PIN_RESET == ADS131M08_read_cs_signal())
{}
ADS131M08_control_cs_signal(RESET_SIGNAL);
if(sendFlg == SEND_SYSTEM_CMD)
{
if(HAL_OK != HAL_SPI_TransmitReceive(adcConfM->hspi, adcConfM->txBuf, adcConfM->rxBuf, adcConfM->bufLen, SPI_DEFAULT_TIMEOUT))
{
return HAL_ERROR;
}
adcConfM->response = combineBytes(adcConfM->rxBuf[0], adcConfM->rxBuf[1]);
if(cmd != adcConfM->response)
{
return HAL_ERROR;
}
}
else if(sendFlg == SEND_REGISTER_CMD)
{
// temp = ADS131M08_REG_COMMAND(cmd,addr);
// confirmBuf[0] = ADS131M08_UPPER(temp);
//
// if(confirmBuf[0] != adcConfM->rxBuf[0])
// {
// return HAL_ERROR;
// }
// else
// {
// memset(adcConfM->rxBuf, 0, adcConfM->bufLen);
result = HAL_SPI_TransmitReceive(adcConfM->hspi, adcConfM->txBuf, adcConfM->rxBuf, adcConfM->bufLen, SPI_DEFAULT_TIMEOUT);
memset(adcConfM->rxBuf, 0, adcConfM->bufLen);
// result = HAL_SPI_Receive(adcConfM->hspi, adcConfM->rxBuf, adcConfM->bufLen, SPI_DEFAULT_TIMEOUT);
adcConfM->sr.mp[adcConfM->regAddr] = combineBytes(adcConfM->rxBuf[0], adcConfM->rxBuf[1]);
// }
//
// if(regs != adcConfM->sr.mp[adcConfM->regAddr])
// {
// return HAL_ERROR;
// }
}
else
{
// Do Nothing
}
ADS131M08_control_cs_signal(SET_SIGNAL);
return HAL_OK;
}
//*****************************************************************************
//
//! Updates the registerMap[] array to its default values.
//!
//! \fn void restoreRegisterDefaults(void)
//!
//! NOTES:
//! - If the MCU keeps a copy of the ADS131M0x register settings in memory,
//! then it is important to ensure that these values remain in sync with the
//! actual hardware settings. In order to help facilitate this, this function
//! should be called after powering up or resetting the device (either by
//! hardware pin control or SPI software command).
//!
//! - Reading back all of the registers after resetting the device can
//! accomplish the same result; however, this might be problematic if the
//! device was previously in CRC mode or the WLENGTH was modified, since
//! resetting the device exits these modes. If the MCU is not aware of this
//! mode change, then read register commands will return invalid data due to
//! the expectation of data appearing in a different byte position.
//!
//! \return None.
//
//*****************************************************************************
void restoreRegisterDefaults(void)
{
adcConfM->sr.mp[ID_ADDRESS] = 0x00; /* NOTE: This a read-only register */
adcConfM->sr.mp[STATUS_ADDRESS] = STATUS_DEFAULT;
adcConfM->sr.mp[MODE_ADDRESS] = MODE_DEFAULT;
adcConfM->sr.mp[CLOCK_ADDRESS] = CLOCK_DEFAULT;
adcConfM->sr.mp[GAIN1_ADDRESS] = GAIN1_DEFAULT;
adcConfM->sr.mp[GAIN2_ADDRESS] = GAIN2_DEFAULT;
adcConfM->sr.mp[CFG_ADDRESS] = CFG_DEFAULT;
adcConfM->sr.mp[THRSHLD_MSB_ADDRESS] = THRSHLD_MSB_DEFAULT;
adcConfM->sr.mp[THRSHLD_LSB_ADDRESS] = THRSHLD_LSB_DEFAULT;
adcConfM->sr.mp[CH0_CFG_ADDRESS] = CH0_CFG_DEFAULT;
adcConfM->sr.mp[CH0_OCAL_MSB_ADDRESS] = CH0_OCAL_MSB_DEFAULT;
adcConfM->sr.mp[CH0_OCAL_LSB_ADDRESS] = CH0_OCAL_LSB_DEFAULT;
adcConfM->sr.mp[CH0_GCAL_MSB_ADDRESS] = CH0_GCAL_MSB_DEFAULT;
adcConfM->sr.mp[CH0_GCAL_LSB_ADDRESS] = CH0_GCAL_LSB_DEFAULT;
#if (CHANNEL_COUNT > 1)
adcConfM->sr.mp[CH1_CFG_ADDRESS] = CH1_CFG_DEFAULT;
adcConfM->sr.mp[CH1_OCAL_MSB_ADDRESS] = CH1_OCAL_MSB_DEFAULT;
adcConfM->sr.mp[CH1_OCAL_LSB_ADDRESS] = CH1_OCAL_LSB_DEFAULT;
adcConfM->sr.mp[CH1_GCAL_MSB_ADDRESS] = CH1_GCAL_MSB_DEFAULT;
adcConfM->sr.mp[CH1_GCAL_LSB_ADDRESS] = CH1_GCAL_LSB_DEFAULT;
#endif
#if (CHANNEL_COUNT > 2)
adcConfM->sr.mp[CH2_CFG_ADDRESS] = CH2_CFG_DEFAULT;
adcConfM->sr.mp[CH2_OCAL_MSB_ADDRESS] = CH2_OCAL_MSB_DEFAULT;
adcConfM->sr.mp[CH2_OCAL_LSB_ADDRESS] = CH2_OCAL_LSB_DEFAULT;
adcConfM->sr.mp[CH2_GCAL_MSB_ADDRESS] = CH2_GCAL_MSB_DEFAULT;
adcConfM->sr.mp[CH2_GCAL_LSB_ADDRESS] = CH2_GCAL_LSB_DEFAULT;
#endif
#if (CHANNEL_COUNT > 3)
adcConfM->sr.mp[CH3_CFG_ADDRESS] = CH3_CFG_DEFAULT;
adcConfM->sr.mp[CH3_OCAL_MSB_ADDRESS] = CH3_OCAL_MSB_DEFAULT;
adcConfM->sr.mp[CH3_OCAL_LSB_ADDRESS] = CH3_OCAL_LSB_DEFAULT;
adcConfM->sr.mp[CH3_GCAL_MSB_ADDRESS] = CH3_GCAL_MSB_DEFAULT;
adcConfM->sr.mp[CH3_GCAL_LSB_ADDRESS] = CH3_GCAL_LSB_DEFAULT;
#endif
#if (CHANNEL_COUNT > 4)
adcConfM->sr.mp[CH4_CFG_ADDRESS] = CH4_CFG_DEFAULT;
adcConfM->sr.mp[CH4_OCAL_MSB_ADDRESS] = CH4_OCAL_MSB_DEFAULT;
adcConfM->sr.mp[CH4_OCAL_LSB_ADDRESS] = CH4_OCAL_LSB_DEFAULT;
adcConfM->sr.mp[CH4_GCAL_MSB_ADDRESS] = CH4_GCAL_MSB_DEFAULT;
adcConfM->sr.mp[CH4_GCAL_LSB_ADDRESS] = CH4_GCAL_LSB_DEFAULT;
#endif
#if (CHANNEL_COUNT > 5)
adcConfM->sr.mp[CH5_CFG_ADDRESS] = CH5_CFG_DEFAULT;
adcConfM->sr.mp[CH5_OCAL_MSB_ADDRESS] = CH5_OCAL_MSB_DEFAULT;
adcConfM->sr.mp[CH5_OCAL_LSB_ADDRESS] = CH5_OCAL_LSB_DEFAULT;
adcConfM->sr.mp[CH5_GCAL_MSB_ADDRESS] = CH5_GCAL_MSB_DEFAULT;
adcConfM->sr.mp[CH5_GCAL_LSB_ADDRESS] = CH5_GCAL_LSB_DEFAULT;
#endif
#if (CHANNEL_COUNT > 6)
adcConfM->sr.mp[CH6_CFG_ADDRESS] = CH6_CFG_DEFAULT;
adcConfM->sr.mp[CH6_OCAL_MSB_ADDRESS] = CH6_OCAL_MSB_DEFAULT;
adcConfM->sr.mp[CH6_OCAL_LSB_ADDRESS] = CH6_OCAL_LSB_DEFAULT;
adcConfM->sr.mp[CH6_GCAL_MSB_ADDRESS] = CH6_GCAL_MSB_DEFAULT;
adcConfM->sr.mp[CH6_GCAL_LSB_ADDRESS] = CH6_GCAL_LSB_DEFAULT;
#endif
#if (CHANNEL_COUNT > 7)
adcConfM->sr.mp[CH7_CFG_ADDRESS] = CH7_CFG_DEFAULT;
adcConfM->sr.mp[CH7_OCAL_MSB_ADDRESS] = CH7_OCAL_MSB_DEFAULT;
adcConfM->sr.mp[CH7_OCAL_LSB_ADDRESS] = CH7_OCAL_LSB_DEFAULT;
adcConfM->sr.mp[CH7_GCAL_MSB_ADDRESS] = CH7_GCAL_MSB_DEFAULT;
adcConfM->sr.mp[CH7_GCAL_LSB_ADDRESS] = CH7_GCAL_LSB_DEFAULT;
#endif
adcConfM->sr.mp[REGMAP_CRC_ADDRESS] = REGMAP_CRC_DEFAULT;
}
//****************************************************************************
//
// Helper functions
//
//****************************************************************************
void ADS131M08_receive_data()
{
ADS131M08_control_cs_signal(RESET_SIGNAL);
HAL_SPI_Receive_DMA(adcConfM->hspi, adcConfM->rxBuf, adcConfM->bufLen);
}
//*****************************************************************************
//
//! Takes a 16-bit word and returns the most-significant byte.
//!
//! \fn uint8_t upperByte(uint16_t uint16_Word)
//!
//! \param temp_word is the original 16-bit word.
//!
//! \return 8-bit most-significant byte.
//
//*****************************************************************************
uint8_t upperByte(uint16_t uint16_Word)
{
uint8_t msByte;
msByte = (uint8_t) ((uint16_Word >> 8) & 0x00FF);
return msByte;
}
//*****************************************************************************
//
//! Takes a 16-bit word and returns the least-significant byte.
//!
//! \fn uint8_t lowerByte(uint16_t uint16_Word)
//!
//! \param temp_word is the original 16-bit word.
//!
//! \return 8-bit least-significant byte.
//
//*****************************************************************************
uint8_t lowerByte(uint16_t uint16_Word)
{
uint8_t lsByte;
lsByte = (uint8_t) (uint16_Word & 0x00FF);
return lsByte;
}
uint32_t ADS131M08_convert_adc_data(const uint8_t* dataBuf)
{
uint32_t upperByte;
uint32_t middleByte;
uint32_t lowerByte;
// The output data extends to 32 bits with eight zeroes(0b00000000, 1Byte) added to the least significant bits when using the 32-bit device word length setting, datasheet 38p
upperByte = ((uint32_t) dataBuf[0] << 16);
middleByte = ((uint32_t) dataBuf[1] << 8);
lowerByte = ((uint32_t) dataBuf[2] << 0);
return (upperByte | middleByte | lowerByte);
}
void ADS131M08_parse_adc_data()
{
uint8_t index;
adcConfM->response = combineBytes(adcConfM->rxBuf[0], adcConfM->rxBuf[1]);
for(ch = ADC_CH1, index = 1; ch < NUMB_ADC_CH; ch++, index++)
{
adcConfM->chData[ch].r = ADS131M08_convert_adc_data(&adcConfM->rxBuf[index * M08_WORD_LENGTH]);
adcConfM->chData[ch].v = ADS131M08_convert_to_mVolt(adcConfM->chData[ch].r);
}
}
float ADS131M08_convert_to_mVolt(uint32_t reg)
{
const float unitFS = 5000.0f / 8388607.0f; // unit: mV (if unit is V, calculated value is out of 'float' range)
const uint32_t boundaryValue = 0x7FFFFF; // threshold of positive value
int signFlg = 0; // +: 1, -: -1
// negative value
if (reg > boundaryValue)
{
reg = (0xFFFFFF - reg) + 1; // if value is 0xFFFFFF, register is -FS/2^23. so plus 1
signFlg = -1;
}
// positive value
else
{
signFlg = 1;
}
// convert register to mVolt
return (unitFS * (float)reg * (float)signFlg);
}
//*****************************************************************************
//
//! Takes two 8-bit words and returns a concatenated 16-bit word.
//!
//! \fn uint16_t combineBytes(uint8_t upperByte, uint8_t lowerByte)
//!
//! \param upperByte is the 8-bit value that will become the MSB of the 16-bit word.
//! \param lowerByte is the 8-bit value that will become the LSB of the 16-bit word.
//!
//! \return concatenated 16-bit word.
//
//*****************************************************************************
uint16_t combineBytes(uint8_t upperByte, uint8_t lowerByte)
{
uint16_t combinedValue;
combinedValue = ((uint16_t) upperByte << 8) | ((uint16_t) lowerByte);
return combinedValue;
}
//*****************************************************************************
//
//! Combines ADC data bytes into a single signed 32-bit word.
//!
//! \fn int32_t combineDataBytes(const uint8_t dataBytes[])
//!
//! \param dataBytes is a pointer to uint8_t[] where the first element is the MSB.
//!
//! \return Returns the signed-extend 32-bit result.
//
//*****************************************************************************
int32_t signExtend(const uint8_t dataBytes[])
{
#ifdef WORD_LENGTH_24BIT
int32_t upperByte = ((int32_t) dataBytes[0] << 24);
int32_t middleByte = ((int32_t) dataBytes[1] << 16);
int32_t lowerByte = ((int32_t) dataBytes[2] << 8);
return (((int32_t) (upperByte | middleByte | lowerByte)) >> 8); // Right-shift of signed data maintains signed bit
#elif defined WORD_LENGTH_32BIT_SIGN_EXTEND
int32_t signByte = ((int32_t) dataBytes[0] << 24);
int32_t upperByte = ((int32_t) dataBytes[1] << 16);
int32_t middleByte = ((int32_t) dataBytes[2] << 8);
int32_t lowerByte = ((int32_t) dataBytes[3] << 0);
return (signByte | upperByte | middleByte | lowerByte);
#elif defined WORD_LENGTH_32BIT_ZERO_PADDED
int32_t upperByte = ((int32_t) dataBytes[0] << 24);
int32_t middleByte = ((int32_t) dataBytes[1] << 16);
int32_t lowerByte = ((int32_t) dataBytes[2] << 8);
return (((int32_t) (upperByte | middleByte | lowerByte)) >> 8); // Right-shift of signed data maintains signed bit
#elif defined WORD_LENGTH_16BIT_TRUNCATED
int32_t upperByte = ((int32_t) dataBytes[0] << 24);
int32_t lowerByte = ((int32_t) dataBytes[1] << 16);
return (((int32_t) (upperByte | lowerByte)) >> 16); // Right-shift of signed data maintains signed bit
#endif
}
void delay_us(uint32_t microseconds)
{
uint32_t tickstart = HAL_GetTick();
uint32_t wait = microseconds * (HAL_RCC_GetHCLKFreq() / 1000000);
while ((HAL_GetTick() - tickstart) < wait);
}