Hii,
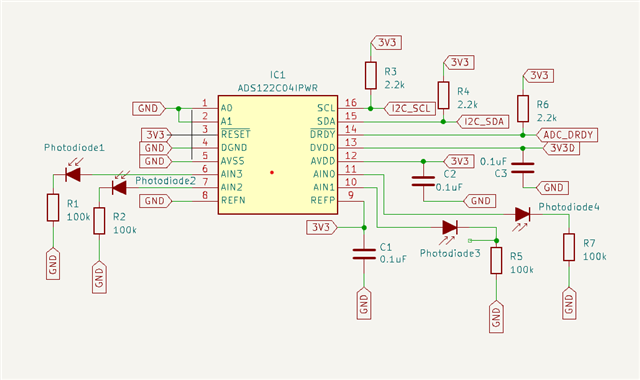
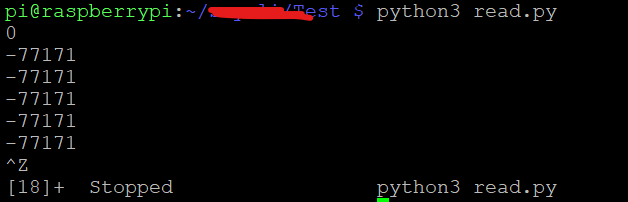
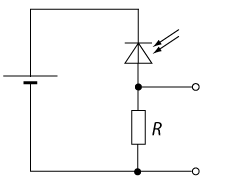
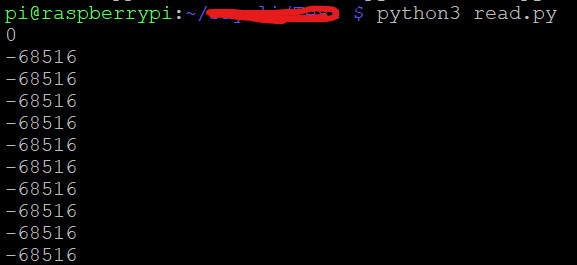
I am trying to read photodiode value using ADS122C04 using raspberry pi4 with i2c.But i am getting constant output as change in input(Photodiode value).
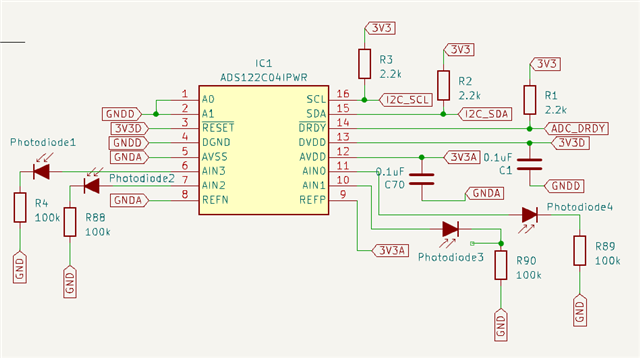
Please correct me if any change in circuit i am using following circuit..
The following is the library for ADS122C04 i am using
import RPi.GPIO as GPIO
from time import sleep
from smbus2 import SMBus, i2c_msg
class ADS122C04:
CMD_RESET = 0x06
CMD_START_SYNC = 0x08
CMD_POWERDOWN = 0x02
CMD_RDATA = 0x10
CMD_RREG = 0x20
CMD_WREG = 0x40
MUX_MASK = 0x1F
MUX_DIF_0_1 = 0x00
MUX_DIF_0_2 = 0x10
MUX_DIF_0_3 = 0x20
MUX_DIF_1_0 = 0x30
MUX_DIF_1_2 = 0x40
MUX_DIF_1_3 = 0x50
MUX_DIF_2_3 = 0x60
MUX_DIF_3_2 = 0x70
MUX_SINGLE_0 = 0x80
MUX_SINGLE_1 = 0x90
MUX_SINGLE_2 = 0xa0
MUX_SINGLE_3 = 0xb0
MUX_REFPmREFN = 0xc0
MUX_AVDDmAVSS = 0xd0
MUX_SHORTED = 0xe0
GAIN_MASK = 0xF3
GAIN_1 = 0x00
GAIN_2 = 0x10
GAIN_4 = 0x20
GAIN_8 = 0x30
GAIN_16 = 0x40
GAIN_32 = 0x50
GAIN_64 = 0x60
GAIN_128 = 0x70
PGA_DISABLED = 0x1
PGA_ENABLED = 0x0
DATA_RATE_MASK = 0xF3
DATA_RATE_20SPS = 0x00
DATA_RATE_45SPS = 0x10
DATA_RATE_90SPS = 0x20
DATA_RATE_175SPS = 0x30
DATA_RATE_330SPS = 0x40
DATA_RATE_600SPS = 0x50
DATA_RATE_1000SPS = 0x60
OP_MODE_NORMAL = 0x00
OP_MODE_TURBO = 0x10
MODE_MASK = 0xFD
MODE_SINGLESHOT = 0x00
MODE_CONTINUOUS = 0x02
VREF_INTERNAL = 0x00
VREF_EXTERNAL = 0x10
VREF_AVDD = 0x20
### TEMP SENSOR MODE
TEMP_SENSOR_OFF = 0x00
TEMP_SENSOR_ON = 0x10
#### --- Configuration Register 2
### DATA COUNTER ENABLE
DCNT_DISABLE = 0x00
DCNT_ENABLE = 0x10
### DATA INTEGRITY CHECK
CRC_DISABLED = 0x00
CRC_INVERTED = 0x10
CRC_CRC16_ENABLED = 0x20
### BURNOUT CURRENT SOURCE
BURN_OUT_CURRENT_OFF = 0x00
BURN_OUT_CURRENT_ON = 0x10
### IDAC CURRENT SETTING
IDAC_CURRENT_OFF = 0x00
IDAC_CURRENT_10_UA = 0x10
IDAC_CURRENT_50_UA = 0x20
IDAC_CURRENT_100_UA = 0x30
IDAC_CURRENT_250_UA = 0x40
IDAC_CURRENT_500_UA = 0x50
IDAC_CURRENT_1000_UA = 0x60
IDAC_CURRENT_1500_UA = 0x70
#### --- Configuration Register 3
### IDAC1 ROUTING CONFIGURATION
IDAC1_DISABLED = 0x00
IDAC1_AIN0 = 0x10
IDAC1_AIN1 = 0x20
IDAC1_AIN2 = 0x30
IDAC1_AIN3 = 0x40
IDAC1_REFP = 0x50
IDAC1_REFN = 0x60
### IDAC2 ROUTING CONFIGURATION
IDAC2_DISABLED = 0x00
IDAC2_AIN0 = 0x10
IDAC2_AIN1 = 0x20
IDAC2_AIN2 = 0x30
IDAC2_AIN3 = 0x40
IDAC2_REFP = 0x50
IDAC2_REFN = 0x60
def write_command(self, reg, cmd):
write_command = 0x40 | (reg << 2)
self.bus.write_byte(self.i2c_adr, write_command, cmd)
def send_command(self, cmd):
self.bus.write_byte(self.i2c_adr, cmd)
def read_registers(self, reg, size):
write = i2c_msg.write(self.i2c_adr, [reg])
read = i2c_msg.read(self.i2c_adr, size)
self.bus.i2c_rdwr(write, read)
return list(read)
def send_command(self, cmd):
self.bus.write_byte(self.i2c_adr, cmd)
def start(self):
self.send_command(0x08)
def reset(self):
self.send_command(0x06)
def powerdown(self):
self.write_command(self.CMD_POWERDOWN)
def config(self, mux=MUX_SINGLE_2, gain=GAIN_1, datarate=DATA_RATE_90SPS, mode=MODE_CONTINUOUS, ref=VREF_EXTERNAL, pga=PGA_DISABLED, op_mode=OP_MODE_NORMAL, temp=TEMP_SENSOR_OFF, dcount=DCNT_DISABLE, crc=CRC_DISABLED, bcurrent=BURN_OUT_CURRENT_OFF, idac=IDAC_CURRENT_OFF, idac1=IDAC1_DISABLED, idac2=IDAC2_DISABLED):
value = mux | gain | datarate | mode | ref | pga | op_mode | temp | dcount | crc | bcurrent | idac | idac1 | idac2
self.bus.write_byte_data(self.i2c_adr, self.CMD_WREG, value)
def ready(self):
buffer = self.read_registers(self.CMD_RREG | 4, 1)
return buffer[0] & 0x80
def waitForResult(self):
if self.rdyPin > 0:
GPIO.wait_for_edge(self.rdyPin, GPIO.FALLING)
else:
while not self.ready():
sleep(0.0005)
def result(self):
buffer = self.read_registers(self.CMD_RDATA, 3)
value = (buffer[0] << 16) | (buffer[1] << 8) | (buffer[2])
if value >= 0x800000:
value = value - 0x1000000
return value
def callback(self, callbackFunction):
GPIO.add_event_detect(self.rdyPin, GPIO.FALLING, callback=lambda _: callbackFunction())
def __init__(self, port=1, address=0x45, rdyPin=0):
# print("_INIT_")
self.i2c_adr = address # 0x40
self.bus = SMBus(port, True)
self.rdyPin = rdyPin
if rdyPin > 0:
GPIO.setmode(GPIO.BCM)
GPIO.setup(rdyPin, GPIO.IN)
def __enter__(self):
# print("_ENTER_")
return self
def __del__(self):
# print("_DEL_")
self.bus.close()
def __exit__(self, exc_type, exc_value, traceback):
# print("_EXIT_")
self.bus.close()
This is code i am using
from time import sleep
from ADS122C04_lib import ADS122C04
ads=ADS122C04( rdyPin=4 )
ads.reset()
ads.config(ads.MUX_SINGLE_2, ads.GAIN_1, ads.DATA_RATE_90SPS, ads.MODE_CONTINUOUS, ads.VREF_EXTERNAL, ads.PGA_DISABLED, ads.OP_MODE_NORMAL, ads.TEMP_SENSOR_OFF, ads.DCNT_DISABLE, ads.CRC_DISABLED, ads.BURN_OUT_CURRENT_OFF, ads.IDAC_CURRENT_OFF, ads.IDAC1_DISABLED, ads.IDAC2_DISABLED)
ads.start()
try:
while True:
result = ads.result()
print(result)
sleep(1) # Adjust the sleep duration as needed
except KeyboardInterrupt:
pass
Please Help
Thanks,