


Part Number: ADS8688
Tool/software:
Subject: ADS8688 SPI Random/Garbage Values with Input Voltage on All 8 Channels
Hello everyone,
I'm currently working with an ADS8688 ADC and am encountering a strange issue that I hope someone can help me with.
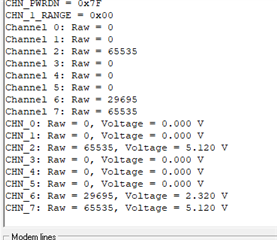
I have input voltages applied to all 8 channels of the ADS8688. However, when I try to read the conversion results via SPI, I'm consistently getting random or garbage values instead of meaningful ADC readings.
Here's some more information that might be helpful:
- ADC Part Number: ADS8688
- Problem: SPI output is random/garbage values despite valid input voltages on all 8 channels.
Could anyone offer some guidance or suggestions on what might be causing this and how to troubleshoot it?
Specifically, I'm wondering about:
- SPI Communication: Are there common pitfalls with the SPI clock, data phase/polarity (CPOL/CPHA), or chip select (CS) timing that could lead to this? My current SPI configuration is [mention].
- Power Supply: Could power supply noise or instability be a factor, even if the chip appears to be powered on?
- Grounding: Are there specific grounding considerations for the ADS8688 or my setup that I might be missing?
- Initialization/Register Configuration: Have I correctly configured all necessary registers (e.g., input range, channel enabling, reference)? I'm following the datasheet's recommended initialization sequence.
- Input Signal Integrity: While I believe my input voltages are stable, is there anything to check regarding signal integrity or over/under-range conditions that might corrupt readings?
- Code Issues: Are there any common coding errors for the ADS8688 (e.g., wrong byte order, incorrect number of bytes read) that could manifest as garbage data?

#include "ADS8688.h"
#include <stdio.h>
/*
* INITIALISATION
*/
uint32_t ADS8688_Init(ADS8688 *ads, SPI_HandleTypeDef *spiHandle, GPIO_TypeDef *csPinBank, uint16_t csPin) {
/* Store interface parameters in struct */
ads->spiHandle = spiHandle;
ads->csPinBank = csPinBank;
ads->csPin = csPin;
uint8_t ads_data[2] = {0};
uint8_t state = 0;
// Reset all registers to default
state += ADS_Cmd_Write(ads, RST, ads_data);
HAL_Delay(100);
// Enable auto mode after reset
state += ADS_Cmd_Write(ads, AUTO_RST, ads_data);
HAL_Delay(10);
// Enable auto transmit for all channels
ads_data[0] = 0xFF; // Enable CH0–CH7
state += ADS_Prog_Write(ads, AUTO_SEQ_EN, ads_data);
HAL_Delay(10);
// Read back for debug
uint8_t check_data[2];
ADS_Prog_Read(ads, AUTO_SEQ_EN, check_data);
printf("AUTO_SEQ_EN = 0x%02X\n", check_data[0]); // Should print 0xFF
// Power down unused channels (CH0, CH2–7)
ads_data[0] = 0xFD; // Power down CH0, CH2–7 (1 = powered down, CH1 active)
state += ADS_Prog_Write(ads, CHN_PWRDN, ads_data);
HAL_Delay(10);
// Read back for debug
ADS_Prog_Read(ads, CHN_PWRDN, check_data);
printf("CHN_PWRDN = 0x%02X\n", check_data[0]); // Should print 0xFD
// Set desired features
ads_data[0] = 0x03; // Default feature select
state += ADS_Prog_Write(ads, FEATURE_SELECT, ads_data);
HAL_Delay(10);
// Set input ranges (all channels: ±2.56 V for consistency)
ads_data[0] = 0x06; state += ADS_Prog_Write(ads, CHN_0_RANGE, ads_data); HAL_Delay(10);
ads_data[0] = 0x06; state += ADS_Prog_Write(ads, CHN_1_RANGE, ads_data); HAL_Delay(10);
ads_data[0] = 0x06; state += ADS_Prog_Write(ads, CHN_2_RANGE, ads_data); HAL_Delay(10);
ads_data[0] = 0x06; state += ADS_Prog_Write(ads, CHN_3_RANGE, ads_data); HAL_Delay(10);
ads_data[0] = 0x06; state += ADS_Prog_Write(ads, CHN_4_RANGE, ads_data); HAL_Delay(10);
ads_data[0] = 0x06; state += ADS_Prog_Write(ads, CHN_5_RANGE, ads_data); HAL_Delay(10);
ads_data[0] = 0x06; state += ADS_Prog_Write(ads, CHN_6_RANGE, ads_data); HAL_Delay(10);
ads_data[0] = 0x06; state += ADS_Prog_Write(ads, CHN_7_RANGE, ads_data); HAL_Delay(10);
// Read back Channel 1 range for debug
ADS_Prog_Read(ads, CHN_1_RANGE, check_data);
printf("CHN_1_RANGE = 0x%02X\n", check_data[0]); // Should print 0x06
return state;
}
/*
* REGISTER ACCESS FUNCTIONS
*/
HAL_StatusTypeDef ADS_Prog_Read(ADS8688 *ads, uint8_t addr, uint8_t *data) {
HAL_StatusTypeDef ret;
uint16_t txbuf[1] = {((addr << 1) & 0xFE) << 8};
uint16_t rxbuf[1];
HAL_GPIO_WritePin(ads->csPinBank, ads->csPin, GPIO_PIN_RESET);
ret = HAL_SPI_TransmitReceive(ads->spiHandle, (uint8_t *)txbuf, (uint8_t *)rxbuf, 1, 10);
HAL_GPIO_WritePin(ads->csPinBank, ads->csPin, GPIO_PIN_SET);
data[0] = (rxbuf[0] >> 8) & 0xFF;
data[1] = rxbuf[0] & 0xFF;
return ret;
}
HAL_StatusTypeDef ADS_Prog_Write(ADS8688 *ads, uint8_t addr, uint8_t *data) {
HAL_StatusTypeDef ret;
uint16_t txbuf[1] = {((addr << 1) | 0x01) << 8 | data[0]};
uint16_t rxbuf[1];
HAL_GPIO_WritePin(ads->csPinBank, ads->csPin, GPIO_PIN_RESET);
ret = HAL_SPI_TransmitReceive(ads->spiHandle, (uint8_t *)txbuf, (uint8_t *)rxbuf, 1, 10);
HAL_GPIO_WritePin(ads->csPinBank, ads->csPin, GPIO_PIN_SET);
data[0] = rxbuf[0] & 0xFF;
data[1] = 0;
return ret;
}
HAL_StatusTypeDef ADS_Cmd_Write(ADS8688 *ads, uint8_t cmd, uint8_t *data) {
HAL_StatusTypeDef ret;
uint16_t txbuf[1] = {cmd << 8};
uint16_t rxbuf[1];
HAL_GPIO_WritePin(ads->csPinBank, ads->csPin, GPIO_PIN_RESET);
ret = HAL_SPI_TransmitReceive(ads->spiHandle, (uint8_t *)txbuf, (uint8_t *)rxbuf, 1, 10);
HAL_GPIO_WritePin(ads->csPinBank, ads->csPin, GPIO_PIN_SET);
data[0] = (rxbuf[0] >> 8) & 0xFF;
data[1] = rxbuf[0] & 0xFF;
return ret;
}
/*
* READ ALL CHANNELS (AUTO MODE)
*/
HAL_StatusTypeDef ADS_Read_All_Raw(ADS8688 *ads, uint16_t *data) {
HAL_StatusTypeDef ret = HAL_OK;
uint16_t txbuf[1] = { CONT << 8 }; // Continue command (0x00)
uint16_t rxbuf[1];
for (int i = 0; i < CHNS_NUM_READ; i++) {
// Pull CS low to start SPI transaction
HAL_GPIO_WritePin(ads->csPinBank, ads->csPin, GPIO_PIN_RESET);
// Send CONT command and receive data
ret = HAL_SPI_TransmitReceive(
ads->spiHandle,
(uint8_t *)txbuf,
(uint8_t *)rxbuf,
sizeof(txbuf),
100
);
// Pull CS high to end SPI transaction
HAL_GPIO_WritePin(ads->csPinBank, ads->csPin, GPIO_PIN_SET);
if (ret != HAL_OK) {
printf("SPI Error on channel %d\r\n", i);
return ret;
}
// Store the 16-bit raw ADC value
data[i] = rxbuf[0];
printf("Channel %d: Raw = %u\n", i, data[i]); // Debug print
HAL_Delay(1); // Small delay for stability
}
return HAL_OK;
}
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "ADS8688.h"
#include <stdio.h>
#include <string.h>
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#define default_interval 500
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
unsigned int current = 0, previous = 0, interval = default_interval;
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
ADS8688 ads;
uint16_t ads_data[8]; // All 8 channels
float volt_helper = 0;
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
SPI_HandleTypeDef hspi3;
UART_HandleTypeDef huart4;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_SPI3_Init(void);
static void MX_UART4_Init(void);
/* USER CODE BEGIN PFP */
int __io_putchar(int ch)
{
HAL_UART_Transmit(&huart4, (uint8_t *)&ch, 1, 100); // 100 ms timeout
return ch;
}
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_SPI3_Init();
MX_UART4_Init();
/* USER CODE BEGIN 2 */
printf("UART Test\n"); // Debug print to confirm UART
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_15, GPIO_PIN_SET);
if (ADS8688_Init(&ads, &hspi3, GPIOA, GPIO_PIN_15) != 0) {
printf("ADS8688 Initialization Failed\n");
Error_Handler();
}
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
current = HAL_GetTick();
if (current >= previous + interval) {
// Read all 8 channels
if (ADS_Read_All_Raw(&ads, ads_data) != HAL_OK) {
printf("Error reading ADS8688 data\n");
previous = current;
continue;
}
// Process and print data for each channel
char output[512];
int len = 0;
for (int i = 0; i < 8; i++) {
volt_helper = ((float)ads_data[i]) * 4.098f / 65535.0f; // ±2.56 V range
len += snprintf(output + len, sizeof(output) - len,
"CHN_%d: Raw = %u, Voltage = %.3f V\n", i, ads_data[i], volt_helper);
}
HAL_UART_Transmit(&huart4, (uint8_t *)output, len, 100);
previous = current;
break ;
}
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
/* USER CODE END 3 */
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE3);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief SPI3 Initialization Function
* @param None
* @retval None
*/
static void MX_SPI3_Init(void)
{
/* USER CODE BEGIN SPI3_Init 0 */
/* USER CODE END SPI3_Init 0 */
/* USER CODE BEGIN SPI3_Init 1 */
/* USER CODE END SPI3_Init 1 */
/* SPI3 parameter configuration*/
hspi3.Instance = SPI3;
hspi3.Init.Mode = SPI_MODE_MASTER;
hspi3.Init.Direction = SPI_DIRECTION_2LINES;
hspi3.Init.DataSize = SPI_DATASIZE_16BIT;
hspi3.Init.CLKPolarity = SPI_POLARITY_LOW;
hspi3.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi3.Init.NSS = SPI_NSS_SOFT;
hspi3.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_16;
hspi3.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi3.Init.TIMode = SPI_TIMODE_DISABLE;
hspi3.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi3.Init.CRCPolynomial = 10;
if (HAL_SPI_Init(&hspi3) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN SPI3_Init 2 */
/* USER CODE END SPI3_Init 2 */
}
/**
* @brief UART4 Initialization Function
* @param None
* @retval None
*/
static void MX_UART4_Init(void)
{
/* USER CODE BEGIN UART4_Init 0 */
/* USER CODE END UART4_Init 0 */
/* USER CODE BEGIN UART4_Init 1 */
/* USER CODE END UART4_Init 1 */
huart4.Instance = UART4;
huart4.Init.BaudRate = 115200;
huart4.Init.WordLength = UART_WORDLENGTH_8B;
huart4.Init.StopBits = UART_STOPBITS_1;
huart4.Init.Parity = UART_PARITY_NONE;
huart4.Init.Mode = UART_MODE_TX_RX;
huart4.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart4.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart4) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN UART4_Init 2 */
/* USER CODE END UART4_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* USER CODE BEGIN MX_GPIO_Init_1 */
/* USER CODE END MX_GPIO_Init_1 */
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_15, GPIO_PIN_RESET);
/*Configure GPIO pin : PA15 */
GPIO_InitStruct.Pin = GPIO_PIN_15;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN MX_GPIO_Init_2 */
/* USER CODE END MX_GPIO_Init_2 */
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */

