Tool/software:
Dear support team,
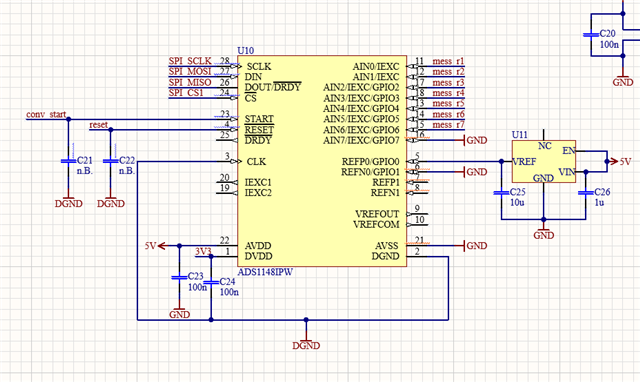
I am currently developing a test system where I am using 4 ADC´s to convert the measured voltage of shunt resistors. The ADS1148 is communicating with a Raspberry Pi via SPI. I use 4.096V as Vref.
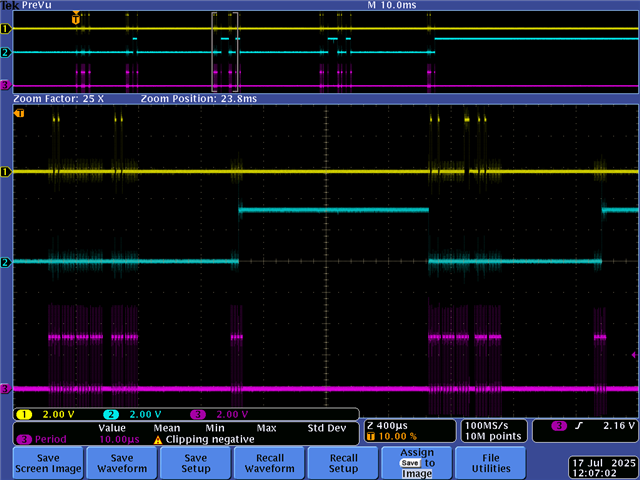
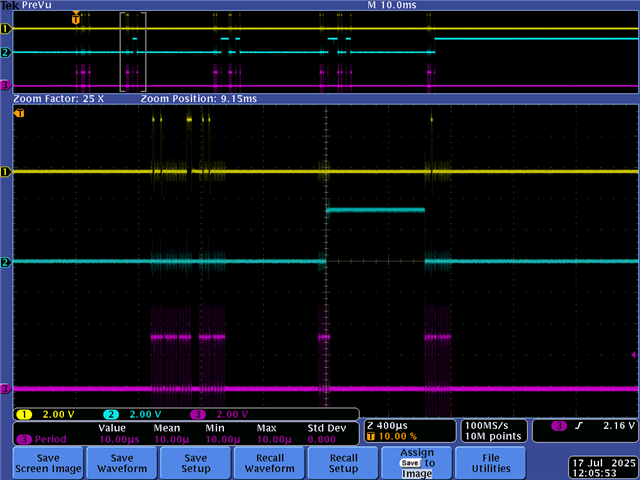
My 1.problem: I think my SPI communication is right and I already measured the communication (picture appended) but no matter which voltage I put on an input pin, the Raspberry Pi reads = or 0.0005V (something like this).
I also read read the dos and donts in the data sheets and saw that maybe my supply is wrong for measuring with Ground but I also tested to measure AIN0 and AIN6 where AIN0 is at 2V and AIN6 is at 200 mV. So the Supply of GND and 5V shouldn´t be a problem.
I will also attache my Code which i am using for testing the ADC. (Sorry for the confusing structure, I changed a lot during testing  )
)
ps: If you find something else that is wrong, feel free to tell me.
Thank you for your help and kind Regards!
#include <stdio.h>
#include <stdlib.h>
#include <stdarg.h>
#include <stdint.h>
#include <unistd.h>
#include <string.h>
#include <sys/timex.h>
#include <sys/stat.h>
#include <sys/resource.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <linux/spi/spidev.h>
#include <linux/i2c-dev.h>
#include <sys/resource.h>
#include <pigpio.h>
#include <stdbool.h>
/*
gcc -o ADC_Test_3 ADC_Test_3.c -lpigpio -lrt -lpthread
sudo ./ADC_Test_3
*/
/*
20240502: f_write_result_file: l_char[55] --> l_char[65]
*/
// +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
#define cGlitchFilter 30000 // glitch filter time in us
#define cfg_I2t_threshold "I2t_threshold" //threshold for I2t value to trigger
#define cfg_timeout "timeout" // timeout in [s] to build I2t value
#define cfg_I_threshold "I_threshold" //threshold for I value to trigger measuring
#define cfg_t_turnoff "t_turnoff" //threshold for I value to trigger measuring
#define PFAD1 12
#define PFAD2 13
#define PFAD3 14
#define PFAD4 15
#define PFAD5 16
#define PFAD6 18
#define PFAD7 19
#define PFAD8 20
#define PFAD9 21
#define PFAD10 23
#define PFAD11 24
#define PFAD12 25
#define reset 6
#define conv_start 5
#define DL_Trigger 26
//SPI
#define CS1 4
#define CS2 17
#define CS3 27
#define CS4 22
/*
#define SPI_CLK 23 //SPI SPI_CLK
#define MISO1 19 //SPI MISO
#define MOSI 21 //SPI MOSI
//#define SPI_CS 25 //SPI SPI_CS
*/
//I2C
#define I2C_BUS "/dev/i2c-1"
#define MCP23017_ADDR 0x20
#define cFilenameSize 37
#define cDateTimeSize 19
// ----------
// ----------
static const char *device = "/dev/spidev0.0" ;
static uint32_t speed = 100000 ; // 4000000 is ok
static uint8_t mode = SPI_MODE_1 ; // spi mode
static uint8_t bits = 8 ; //
const int cs_gpio[4] = {4, 17, 27, 22}; //GPIO´s für CS
// -----------------------------------------------------------
typedef struct {
char value; // value 0,1
char value_changed; // value has changed
unsigned T_deglitch; //T_deglitch
unsigned tick_1;
unsigned cc; //count where we are in time for deglitch
} timed_pin_t;
timed_pin_t g_IN1; // IN1 turns off program
timed_pin_t g_IN2; // enable current measument
timed_pin_t g_Enable; // operation is activated
timed_pin_t g_LED_I; // RPI status LED3
timed_pin_t g_Trenner; // pyro main switch
// -----------------------------------------------------------
enum status {
cStatusWaitForEnable, // status: wait for gENABLE PIN == 1
cStatusWaitForOperation, // status: wait for gENABLE PIN == 1 && IN2 == 1
cStatusWaitForCurrent, // status: wait for high current
cStatusI2t, // status: current flowing, build I2t integral
cStatusIturnoff, // status: turning off I, takes time
cStatusI2tDone, // status: built I2t integral, fuse bit is set
cStatusEnd, // status: program is stopped
cStatusError // status: error, problem
};
char status_name[8][30] = {
"cStatusWaitForEnable",
"cStatusWaitForOperation",
"cStatusWaitForCurrent",
"cStatusI2t",
"cStatusIturnoff",
"cStatusI2tDone",
"cStatusEnd",
"cStatusError"
};
enum status g_status, // actual status
g_status_1; // status before
unsigned g_tick, g_tick_1
//,g_rising_edge_enable // rising edge of GENABLE
;
int bb // decision variable
,g_fdevice // serial device
;
int g_secs, g_mics; // time variables
float g_I2t_threshold, // config: I2t threshold
g_timeout, // config: timeout
g_I_threshold, // config: I threshold
g_i2t; // measured, calculated I2t ;
unsigned g_t_i, // time elapsed since current has been detected
g_int_timeout, // integer value of timeout in [us] of config file
g_t_turnoff, // time in [us] read from config file
g_t_turnoff_t, // time in [us] acutual time plus g_t_turnoff
g_t_turnoff_t_index // when was I turned off
;
FILE *p_result_file, *p_log_file; // result and log file pointer
// ./logs/YYMMDD_hh-mm-ss_I2t_res.txt
char g_result_file[cFilenameSize] = "./logs/";
// ./logs/YYMMDD_hh-mm-ss_I2t_log.txt
char g_log_file[cFilenameSize] = "./logs/";
char g_date_time[cDateTimeSize] // general use
,g_date_time_I[cDateTimeSize] // time stamp of first time I > I threshold
,g_char1[50]= ""; // general use
;
time_t g_rawtime_1st_I, // time stamp of first time I > I threshold
g_rawtime_turnoff // time stamp when I is turned off
;
struct tm *g_info; // for time string
struct I_of_t_t
{
float i; // value
float i2; //i² of this t
unsigned t; //delta t to last time t
uint8_t turnoff; // is current turned off
struct I_of_t_t *p_prev; // p to previous element
struct I_of_t_t *p_next; // p to next element
};
struct I_of_t_t *g_i; // actual element
struct I_of_t_t *g_i1st; // 1st element
struct I_of_t_t *g_ilast; // last element
// ----------
int g_cc = 0; // count steps while measuruing current
int g_ret = 0; // g return variable
uint16_t g_value = 0 ; // ADC value
uint32_t g_tick_0, g_tick_1; // acutual tick, tick before
float g_x =1.1; // float variable for ADC
double adc_values[4][7]; // Matrix for values
unsigned char g_tx[] = { 0x01, 0x80, 0x00 } ; // tx array
unsigned char g_rx[] = { 0x00, 0x00, 0x00 } ; // rx array
struct spi_ioc_transfer g_spi[1]; // SPI array
// ----------
typedef struct{
int value;
int sum;
bool disabled;
unsigned tick_1;
unsigned time;
time_t t_off;
} Pfad;
int adc_gpios[4][7] =
{
{12, 13, 14, 15, 16, 18, 19}, //ADC 0
{20, 21, 23, 24, 25, 7, 0}, //ADC 1, ab ch5 Adresse für GPIO-Expander
{7, 0, 6, 1, 5, 2, 4}, //ADC 2, Adresse für GPIO-Expander
{3, 3, 4, 2, 5, 1, 6} //ADC 3, Adresse für GPIO-Expander
};
Pfad pfade [4][7]; //Matrix alle Pfade
Pfad *p; //Hilfsvariable auf aktuellen Pfad
bool control; //Hilfsvariable Pfad Okay/Nicht okay?
int pin; //Variable für Pin bei Enable/disable Pfad
double Vref = 4.096;
double gain = 1.0;
double shunt = 0.1;
// --------------- SPI
// ******************************************************************
// -----------------------------------------------------------
void f_INIT() {
//GPIO Outputs setzen mit pigpio-Bibliothek
gpioSetMode(PFAD1 , PI_OUTPUT);
gpioSetMode(PFAD2 , PI_OUTPUT);
gpioSetMode(PFAD3 , PI_OUTPUT);
gpioSetMode(PFAD4 , PI_OUTPUT);
gpioSetMode(PFAD5 , PI_OUTPUT);
gpioSetMode(PFAD6 , PI_OUTPUT);
gpioSetMode(PFAD7 , PI_OUTPUT);
gpioSetMode(PFAD8 , PI_OUTPUT);
gpioSetMode(PFAD9 , PI_OUTPUT);
gpioSetMode(PFAD10 , PI_OUTPUT);
gpioSetMode(PFAD11 , PI_OUTPUT);
gpioSetMode(DL_Trigger , PI_OUTPUT);
gpioSetMode(reset , PI_OUTPUT);
gpioSetMode(conv_start , PI_OUTPUT);
//SPI und I2C als Outputs setzen?
gpioSetMode(CS1, PI_OUTPUT);
gpioSetMode(CS2, PI_OUTPUT);
gpioSetMode(CS3, PI_OUTPUT);
gpioSetMode(CS4, PI_OUTPUT);
gpioSetMode(PFAD1, PI_OUTPUT);
gpioSetMode(PFAD9, PI_OUTPUT);
gpioWrite(reset, 1);
}
// -----------------------------------------------------------
int f_INIT_SPI() {
int l_ret =0;
memset( &g_spi, 0, sizeof(g_spi) ) ;
g_spi[0].tx_buf = (unsigned long)g_tx ;
g_spi[0].rx_buf = (unsigned long)g_rx ;
//g_spi[0].len = 3 ;
g_spi[0].delay_usecs = 0 ;
g_spi[0].speed_hz = speed ;
g_spi[0].bits_per_word = bits ;
g_spi[0].cs_change = 0 ;
g_fdevice = open( device, O_RDWR ) ;
if( g_fdevice < 0 )
{
fprintf( stderr, "can't open device\n" ) ;
return 1 ;
}
l_ret = ioctl( g_fdevice, SPI_IOC_WR_MODE, &mode ) ;
if( l_ret == -1 )
{
close( g_fdevice ) ;
fprintf( stderr, "can't set mode\n" ) ;
return 2 ;
}
l_ret = ioctl( g_fdevice, SPI_IOC_WR_BITS_PER_WORD, &bits ) ;
if( l_ret == -1 )
{
close( g_fdevice ) ;
fprintf( stderr, "can't set bits\n" ) ;
return 3 ;
}
l_ret = ioctl( g_fdevice, SPI_IOC_WR_MAX_SPEED_HZ, &speed ) ;
if( l_ret == -1 )
{
close( g_fdevice ) ;
fprintf( stderr, "can't set speed\n" ) ;
return 4 ;
}
return 0;
}
// -----------------------------------------------------------
int f_READ_SPI() {
// read value of ADC
g_tick_1 = g_tick_0;
g_tick_0 = gpioTick();
g_spi[0].len = 4;
g_spi[0].tx_buf = (unsigned long)g_tx;
g_spi[0].rx_buf = (unsigned long)g_rx;
g_tx[0] = 0x12; // RDATA command
g_tx[1] = 0x00; // 3 leere Bytes zum Lesen des Werts
g_tx[2] = 0x00;
g_tx[3] = 0x00;
g_ret = ioctl( g_fdevice, SPI_IOC_MESSAGE(1), &g_spi ) ;
if( g_ret == -1 )
{
//close( g_fdevice ) ;
fprintf( stderr, "can't transfer data\n" ) ;
//return 5 ;
}
else {
g_value = (int) (( (g_rx[1] & 0x0F) << 16) | (g_rx[2] << 8) | g_rx[3] );
//printf( "%.3f .. %d\n", g_x, g_tick_0 - g_tick_1 );
return g_value;
}
}
// -----------------------------------------------------------
void f_select_adc(int adc) {
for (int i = 0; i < 4; i++) {
//gpioWrite(cs_gpio[i], (i == adc) ? 0 : 1); //nur CS von ausgewähltem ADC wird auf 0 (aktiv) gesetzt
gpioWrite(cs_gpio[0], 1);
gpioWrite(cs_gpio[1], 1);
gpioWrite(cs_gpio[2], 1);
gpioWrite(cs_gpio[3], 1);
gpioWrite(cs_gpio[adc], 0);
}
}
// -----------------------------------------------------------
void f_select_channel(int adc, int channel)
{
f_select_adc(adc);
usleep(10000);
// 1. MUX0 schreiben (WREG)
g_tx[0] = 0x42; // WREG, ab Adresse 0x00
g_tx[1] = 0x00; // 1 Register = 0x00
g_tx[2] = (channel << 4) | 0x07; // AIN[channel] gegen AIN7
g_spi[0].len = 3;
g_spi[0].tx_buf = (unsigned long)g_tx;
g_spi[0].rx_buf = (unsigned long)g_rx;
if (ioctl(g_fdevice, SPI_IOC_MESSAGE(1), &g_spi[0]) < 1) {
perror("SPI write error");
return;
}
usleep(2000);
// 2. RREG Befehl senden
g_tx[0] = 0x22; // RREG ab Adresse 0x00
g_tx[1] = 0x00; // 1 Register = 0x00
g_tx[2] = 0x00;
g_spi[0].len = 2;
g_spi[0].tx_buf = (unsigned long)g_tx;
g_spi[0].rx_buf = (unsigned long)g_rx;
if (ioctl(g_fdevice, SPI_IOC_MESSAGE(1), &g_spi[0]) < 1) {
perror("SPI read command error");
return;
}
// 3. 1 Byte Dummy senden, um Register zu lesen
uint8_t dummy_tx = 0x00;
uint8_t mux_value = 0;
g_spi[0].len = 1;
g_spi[0].tx_buf = (unsigned long)&dummy_tx;
g_spi[0].rx_buf = (unsigned long)&mux_value;
if (ioctl(g_fdevice, SPI_IOC_MESSAGE(1), &g_spi[0]) < 1) {
perror("SPI read register value error");
return;
}
printf("MUX0-Register gesetzt: 0x%02X (AIN%d vs AIN7) ADC: %d\n", mux_value, channel, adc);
/*f_select_adc(adc);
usleep(100);
//Kanal auswählen
g_tx[0] = 0x42; // WREG, Start bei 0x00
g_tx[1] = 0x01; // nur ein Register (MUX0)
g_tx[2] = (channel << 4 ) | 0x07 ; // channel gegen Kanal 7
if(ioctl( g_fdevice, SPI_IOC_MESSAGE(1), &g_spi ) < 1){
perror("SPI write error");
}
usleep(200);
g_tx[0] = 0x22; // RREG, Start bei 0x00
g_tx[1] = 0x01; // nur ein Register (MUX0)
g_tx[2] = 0x00; // channel gegen Kanal 7
if(ioctl( g_fdevice, SPI_IOC_MESSAGE(1), &g_spi ) < 1){
perror("SPI write error");
}
printf("aktueller KanaL: %d, %d, %d\n", g_rx[0], g_rx[1], g_rx[2]);*/
}
// -----------------------------------------------------------
void f_read_adc_channel(int adc, int channel)
{
//f_select_adc(adc);
//usleep(12000);
g_spi[0].len = 2;
g_spi[0].tx_buf = (unsigned long)g_tx;
g_spi[0].rx_buf = (unsigned long)g_rx;
//START command
g_tx[0] = 0x08;
g_tx[1] = 0x00;
g_tx[2] = 0x00;
if(ioctl( g_fdevice, SPI_IOC_MESSAGE(1), &g_spi ) < 1){
perror("SPI write error");
}
usleep(12000);
int value = f_READ_SPI();
double voltage = (value) * (Vref / (gain * 8388608.0));//Umrechnung
double current = voltage / shunt;
printf("aktueller Wert: %f\n", voltage);
adc_values[adc][channel] = voltage; //In Matrix speichern
//FÜr Test:
// 2. RREG Befehl senden
g_tx[0] = 0x22; // RREG ab Adresse 0x00
g_tx[1] = 0x00; // 1 Register = 0x00
g_tx[2] = 0x00;
g_spi[0].len = 2;
g_spi[0].tx_buf = (unsigned long)g_tx;
g_spi[0].rx_buf = (unsigned long)g_rx;
if (ioctl(g_fdevice, SPI_IOC_MESSAGE(1), &g_spi[0]) < 1) {
perror("SPI read command error");
return;
}
usleep(500);
// 3. 1 Byte Dummy senden, um Register zu lesen
uint8_t dummy_tx = 0x00;
uint8_t mux_value = 0;
g_spi[0].len = 1;
g_spi[0].tx_buf = (unsigned long)&dummy_tx;
g_spi[0].rx_buf = (unsigned long)&mux_value;
if (ioctl(g_fdevice, SPI_IOC_MESSAGE(1), &g_spi[0]) < 1) {
perror("SPI read register value error");
return;
}
printf("MUX0-Register gelesen: 0x%02X (AIN%d vs AIN6) ADC: %d\n", mux_value, channel, adc);
}
// -----------------------------------------------------------
void f_HARD_RESET_ADC() {
gpioWrite(reset, 0);
usleep(10000);
gpioWrite(reset, 1);
usleep(10000);
}
// -----------------------------------------------------------
void f_INIT_ADC()
{
f_HARD_RESET_ADC();
//reset to default
g_tx[0] = 0x06; // SRESET
g_spi[0].len = 1;
ioctl(g_fdevice, SPI_IOC_MESSAGE(1), &g_spi[0]);
usleep(5000);
g_spi[0].len = 7; // 3+4 Bytes
g_spi[0].tx_buf = (unsigned long)g_tx;
g_spi[0].rx_buf = (unsigned long)g_rx;
g_tx[0] = 0x43; // WREG, Start ab Register 0x03 (SYS0)
g_tx[1] = 0x06; // Anzahl Register: 4 Register (0x03 bis 0x07)
g_tx[2] = 0x00; // SYS0: Gain = 1 (bits 0–2 = 000), Status-Byte aus (bit 6 = 0)
g_tx[3] = 0x00; // OFC0
g_tx[4] = 0x00; // OFC1
g_tx[5] = 0x00; // OFC2
g_tx[6] = 0x04; // DR: 20 SPS (siehe Datenblatt Table 19)
if (ioctl(g_fdevice, SPI_IOC_MESSAGE(1), &g_spi) < 1) {
perror("SPI write error");
}
usleep(500);
//Start Pin auf 0 setzen
g_spi[0].len = 3;
g_spi[0].tx_buf = (unsigned long)g_tx;
g_spi[0].rx_buf = (unsigned long)g_rx;
g_tx[0] = 0x4B; // WREG | 0x09 (Adresse)
g_tx[1] = 0x00; // nur 1 Register schreiben
g_tx[2] = 0x06; // Bit 7 = 0 → START-Pin deaktiviert
if (ioctl(g_fdevice, SPI_IOC_MESSAGE(1), &g_spi) < 1) {
perror("SPI write error");
}
}
// -----------------------------------------------------------
void f_test_select_channel(int adc, int channel)
{
f_select_adc(adc);
usleep(500);
// 1. MUX0 schreiben (WREG)
g_tx[0] = 0x42; // WREG, ab Adresse 0x00
g_tx[1] = 0x00; // 1 Register = 0x00
g_tx[2] = (channel << 4) | 0x07; // AIN[channel] gegen AIN7
g_spi[0].len = 3;
g_spi[0].tx_buf = (unsigned long)g_tx;
g_spi[0].rx_buf = (unsigned long)g_rx;
if (ioctl(g_fdevice, SPI_IOC_MESSAGE(1), &g_spi[0]) < 1) {
perror("SPI write error");
return;
}
usleep(200);
// 2. RREG Befehl senden
g_tx[0] = 0x22; // RREG ab Adresse 0x00
g_tx[1] = 0x00; // 1 Register = 0x00
g_tx[2] = 0x00;
g_spi[0].len = 2;
g_spi[0].tx_buf = (unsigned long)g_tx;
g_spi[0].rx_buf = (unsigned long)g_rx;
if (ioctl(g_fdevice, SPI_IOC_MESSAGE(1), &g_spi[0]) < 1) {
perror("SPI read command error");
return;
}
// 3. 1 Byte Dummy senden, um Register zu lesen
uint8_t dummy_tx = 0x00;
uint8_t mux_value = 0;
g_spi[0].len = 1;
g_spi[0].tx_buf = (unsigned long)&dummy_tx;
g_spi[0].rx_buf = (unsigned long)&mux_value;
if (ioctl(g_fdevice, SPI_IOC_MESSAGE(1), &g_spi[0]) < 1) {
perror("SPI read register value error");
return;
}
printf("MUX0-Register gelesen: 0x%02X (AIN%d vs AIN7)\n", mux_value, channel);
}
// -----------------------------------------------------------
void f_read_all_adcs()
{
//gpioWrite(conv_start, 1);
int hilf;
for(int i = 0; i < 2; i++)
{
f_select_channel(i, 0); //Kanal 0 von jedem ADC wählen
hilf = 0;
}
usleep(12000); //Zeit noch anpassen
for(int ch = 0; ch < 7; ch++)
{
//gpioWrite(conv_start, 0);
printf("%d.\n",(ch+1));
hilf++;
/* //START command
g_tx[0] = 0x08;
g_tx[1] = 0x00;
g_tx[2] = 0x00;
if(ioctl( g_fdevice, SPI_IOC_MESSAGE(1), &g_spi ) < 1){
perror("SPI write error");
}
usleep(12000);*/
for(int adc = 0; adc < 2; adc++)
{
f_read_adc_channel(adc, ch);
usleep(12000);
f_select_channel(adc, hilf);
usleep(12000);
}
//gpioWrite(conv_start, 1);
usleep(100000); //sicherstellen, dass nächster Kanal ausgewählt
//possible: DRDY-Pin nutzen
}
}
// -----------------------------------------------------------
void f_test()
{
printf("-----------------------Test-----------------------\n");
f_select_adc(0);
usleep(500);
// 1. MUX0 schreiben (WREG)
g_tx[0] = 0x42; // WREG, ab Adresse 0x00
g_tx[1] = 0x00; // 1 Register = 0x00
g_tx[2] = (0 << 4) | 0x07; // AIN3 gegen AIN5
g_spi[0].len = 3;
g_spi[0].tx_buf = (unsigned long)g_tx;
g_spi[0].rx_buf = (unsigned long)g_rx;
if (ioctl(g_fdevice, SPI_IOC_MESSAGE(1), &g_spi[0]) < 1) {
perror("SPI write error");
return;
}
printf("g_tx = %d\n", g_tx[2]);
// 2. RREG Befehl senden
g_tx[0] = 0x22; // RREG ab Adresse 0x00
g_tx[1] = 0x00; // 1 Register = 0x00
g_tx[2] = 0x00;
g_spi[0].len = 2;
g_spi[0].tx_buf = (unsigned long)g_tx;
g_spi[0].rx_buf = (unsigned long)g_rx;
if (ioctl(g_fdevice, SPI_IOC_MESSAGE(1), &g_spi[0]) < 1) {
perror("SPI read command error");
return;
}
usleep(500);
// 3. 1 Byte Dummy senden, um Register zu lesen
uint8_t dummytx = 0x00;
uint8_t muxvalue = 0;
g_spi[0].len = 1;
g_spi[0].tx_buf = (unsigned long)&dummytx;
g_spi[0].rx_buf = (unsigned long)&muxvalue;
if (ioctl(g_fdevice, SPI_IOC_MESSAGE(1), &g_spi[0]) < 1) {
perror("SPI read register value error");
return;
}
usleep(500);
printf("MUX0-Register gesetzt: 0x%02X \n", muxvalue);
f_read_adc_channel(0, 0);
usleep(500);
}
// -----------------------------------------------------------
int main()
{
if(gpioInitialise() < 0){
printf("pigpio initialisation failed\n");
return 1;
}
f_INIT();
f_INIT_SPI();
f_select_adc(0);
usleep(1200);
f_INIT_ADC();
//gpioWrite(conv_start, 1);
gpioWrite(PFAD1, 1); //s_pfad1 high setzen für Test
gpioWrite(PFAD9, 1); //s_pfad2 high setzen für Test
usleep(5000);
f_test();
f_test();
f_test();
printf("Wert: %f \n", adc_values[0][0]);
/*double wert;
f_read_all_adcs();
for(int ch = 0; ch < 7; ch++)
{
for(int adc = 0; adc < 2; adc++)
{
wert = adc_values[adc][ch];
printf("Kanal %d von ADC %d hat den Wert: %fA\n", ch, adc, wert);
}
}
//f_select_adc(1);
f_select_adc(0);
//Kanal auswählen
g_tx[0] = 0x40; // WREG, Start bei 0x00
g_tx[1] = 0x00; // nur ein Register (MUX0)
g_tx[2] = (2 << 4 ) | 0x07 ; // channel gegen Kanal 7
if(ioctl( g_fdevice, SPI_IOC_MESSAGE(1), &g_spi ) < 1){
perror("SPI write error");}
usleep(12000);
gpioWrite(conv_start, 0);
usleep(12000);
int test = f_READ_SPI();
printf("aktueller SPI-Ausgabewert: %d \n", test);
gpioWrite(conv_start, 1);*/
return 0;
}
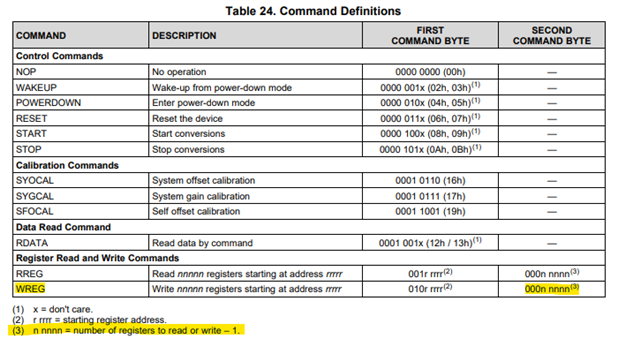
picture of where I send the command to send the data of the ADC:
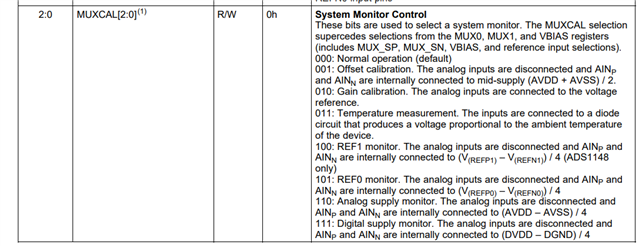
picture of where I select the MUX:
my schematic of the ADS1148: